Építési napló 2, Stage 1.2 - Repül a malomkő, ki tudja hol áll meg

Kész. A felének a negyede. Összeállít, már majdnem repül, de sokkal inkább csak esik-kel az Ogre Mark II. Ha távolról nézzük, peckesen áll, erre mondta egy volt osztálytársam: "megszépítő messzeség". Szinte már egy quadkopter benyomását kelti, csak ne kelljen vele repülni, mert akkor előjönnek a műszaki problémák. Ló ez, nem Ogre, abból is az állatorvosé. Eltörött a lába, lőjük agyon? Ne, inkább mentsük meg.
Aki esetleg nem olvasta volna az előzményeket, az az Építési napló 2, Stage 1.1 cikk alatt megteheti. Megépítettem második gépemet, gondosan megtervezve Ecalcban mindent, kiszámolva grammra, mi, milyen nehéz lesz, mekkora teljesítményt fog felvenni, mi történik ha közben megfogom a bal fülemet és a jobb lábamat felemelem, tehát tényleg mindent. Vagy legalábbis ezt gondoltam, aztán kiderült, hogy az elmélet az elképzelt gyakorlat, valójában viszont ezek a dolgok eléggé távol állnak egymástól. De kezdjük az elején, az alkatrészlistával:
ALKATRÉSZLISTA (szerszámokat és egyéb anyagokat nem számolva)
| ALKATRÉSZ | MARK I. | ÁR | MARK II. | ÁR |
| Váz | DJI F330 replika | 2901 | X4 Alien 360mm | 5904 |
| Talp | DJI landing skid | 780 | DJI Tripod | 769 |
| Leszállótappancsok (4 db) | Walkera Tali | 376 | Bohócorr :D | 558 |
| Akkumulátor (Battery) | Multistar 4000mAh 3S | 5000 | Multistar 5200 4S | 11022 |
| Feszültségjelző (Buzzer) | 2X2 in 1 Lipo Battery LVT | 1100 | 2x2 in Lipo Battery | 1100 |
| Vevő (Receiver) | Flysky FS-A6 | 2835 | Flysky FS-i10 | 5013 |
| Repülésvezérlő (FC) | Naze 32 Full 10DOF | 7376 | NAZA-M Lite | 18388 |
| Sebességszabályzó (ESC) | Emax 4 in 1 25A | 8316 | ZTW Black Widow | 0 |
| LED (2 db) | 1M 5050 SMD 60LED | 2032 | 1M 5050 SMD LED | 2032 |
| Motor (4 db) | DYS BX2212 920KV | 13260 | ZTW 2216 820KV | 14592 |
| Propeller (4 db) | Gemfan 8045 | 1214 | DJI 9045 self-lock ? | 1913 |
| GPS | NINCS | 0 | Ublox M8N GPS | 8357 |
| Távirányító | Emax Nh. EM-16 | 0 | Flysky FS-i6 | 13239 |
| ÖSSZES KÖLTSÉG | 45190 Ft | 82887 Ft |
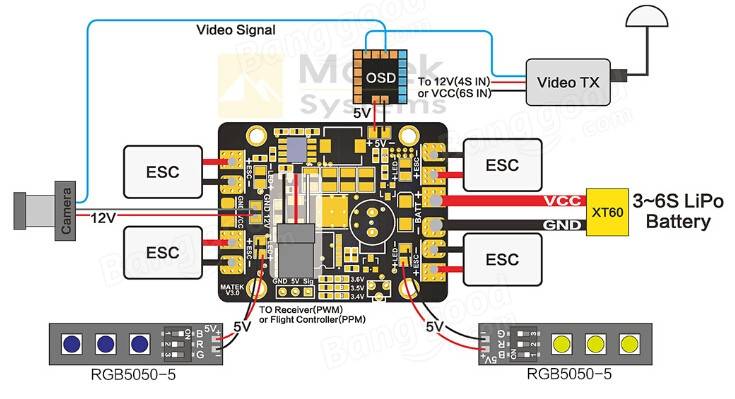
Egy lényeges dolog hiányzik a felsorolásból, amire nem gondoltam az építés előtt, pedig a váz után jelenleg a második legfontosabb alkatrésznek gondolom (építési/tervezési szempontból) ez pedig a PDB. Az egyik nagy szívásfaktort pont ez okozta, ugyanis szükségem volt az alábbi funkciókra:
- be kell kötni valahova a tápot, de úgy hogy 3-4S akkumulátorral is menjen. Be kell továbbá kötni az ESC-ket
- be kell kötni valahova mindent, ami 12V-os. Jelenleg ilyen a 12V led, később pedig a kamera és az FPV adó
- be kell kötni valahova mindent, ami 5V-os, ilyen a vezérlő, az OSD
- kellene Low voltage alarm, hogy ne kelljen buzzerrel, meg ilyenekkel vacakolni
Ezeket csak olyan PDB-vel lehet megoldani, amin van 5V/12V BEC és egy beépített buzzer, ilyet viszont csak egyet találtam, a Matek kombinált lapkáját, vagyis ennek 2700 Ft-os ára nem szerepel a fenti táblázatban. Ez jó választás lett volna sok szempontból, azonban elkövettem néhány hibát, amit majd később részletezek.
A másik problémát az okozta, hogy a ZTW Black Widow motorok kábelei túl rövidek voltak, azért nem értek el a PDB-hez, emiatt meg kellett volna toldani, igen ám, de én csak 12AWG vastagságú kábelt vettem, a fő táp bekötéséhez, ezek pedig 16-18 AWG vastagságúak voltak. Filléres dolog, mégis kiment a fejemből, szóval csak vastagabb kábellel tudtam betoldani őket. Szerencsére a zsugorcső ápol és eltakar, ezért ezen a problémán könnyen túllendültünk volna, ha a 12 AWG kábel végét ugyanolyan könnyű lenne ráforrasztani az érintkező lapkákra, mint a 18AWG-t, de mivel a vastagságuk eltér, nyilván ez nem igaz. Szóval ez nem segített, meg kellett bontanom egy osztókábelt a megfelelő vastagságú toldószárak miatt.
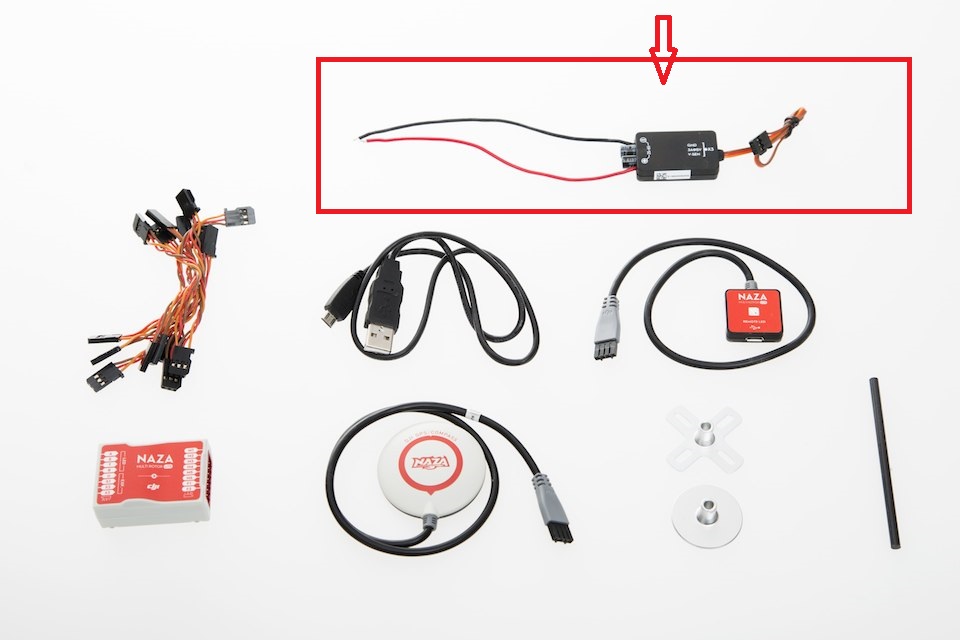
A másik gond az volt, hogy nem számoltam a NAZA M Lite vezérlőhöz adott plusz cuccokal. A csomag az alábbiakból állt:
- Naza M Lite vezérlőcsomag: Naza M lite, PMU modul, ami egy 5V BEC, de egyben feszültségmérést is végez, ezt a vezérlő X3-mas csatornájára kell dugni. Jár hozzá egy LED modul is, amivel a vezérlő visszajelzi az aktuális státuszt, illetve ide lehet csatlakoztatni az USB kábelt, aminek a másik fele a PC-be megy. A lényeg, egyiket sem lehet kihagyni
- Ublox M8N GPS modul, ami a NAZA EXP pinjeire kell csatlakoztatni
A fenti móka + a szervókábelek súlya +70 grammot eredményezett, fölöslegesen megnövelve a gép tömegét.
A harmadik gond a Flysky FS-i10A vevőmodullal volt. Ez egy teljesen jó vevőmodul lenne, csakhogy nem tud PPM-et, emelett még bazi nagy is, cserébe viszont legalább 2 antennás. Így kénytelen voltam egy valag szervókábelt megőrizni, amivel bekötögettem a csatornákat. Mivel nem a NAZA jellegű összedugom, aztán megy vezérlőkhöz vagyok szokva, eleinte nem nagyon értettem mik ezek az előre feljelölt csatornák, de erről majd később.
A sokadik problémát az okozta, hogy a váz közepén a PDB-nek nincsenek furatai, tehát csavarral nem tudtam lefogatni a nyákot. Ezért kétoldalú ragasztóval odaragasztottam nagyjából a cuccot a váz közepére, hogy ne tudjon elmozdulni, mivel gyorsszorítóval nem akartam gyilkolni az áramköri elemeket. Egy szerencsés dolog is segített, még pedig az, hogy a tervezési fázisban még nem számoltam az XK Detect X380 megérkezésével, így viszont nem vettem még egy akkumulátort, hanem annak az 5400mAh 3S akkumulátorát használtam fel, mint áramforrást.
AZ ÉPÍTÉS LÉPÉSEI
Először összeraktam a vázat, hogy lássam, mit hová kell elhelyezni. Néhány dolognak fix helye volt, a motortartókba mentek a motorok, alulra az akkumulátor, felülre a GPS. A vezérlőt közvetlenül a GPS alá helyeztem el, a PDB ment a mértani középpontba, alá a NAZA PMU modulja, míg a vevő az XT60-as betáppal együtt hátra került. A lábak megkapták a led szalagokat (így utólag talán túl sokat is), legalábbis ez volt a terv.




1. A motorokat előre felcsavaroztam a helyükre, sajnos a csavarok túl hosszúnak bizonyultak, ezért kénytelen voltam 2 db alátétet tenni minden motorcsavar alá. Ez igazából nem jó megoldás, mert emiatt rezegni tudnak a motorok, illetve azóta az alátéteket is fémre cseréltem, hogy jobban tartsanak. A kábeleket bevezettem a vázba és elrendeztem. Mivel az ESC egybe van építve a motorokkal, ezzel nem foglalkoztam.



2. Elhelyeztem középen a PDB-t, hogy lássam, nagyjából minek, hova kell jönnie. Az első probléma az volt, hogy be kellett forrasztanom a 12AWG-s XT60 kábelt, ám ez kevés lett volna önmagában, mellé kellett forrasztani a NAZA M PMU modulját is. Ez sajnos nem egy egyszerű feladat, mert a kábel vastag, az érintkező meg kicsi, ezért nagyon vigyázni kell, hogy a forrasztó ón ne folyjon át, a mellette lévő lapkákra (tudom, hogy a + és a + egymás mellett van, mint ahogy a két - is, de egyrészt nem szép, másrészt az lehet vezérelt is, szóval semmiképpen nem szerencsés). Ezt nagy nehezen beszenvedtem egy kis segítséggel a helyére, ekkor jött a probléma, hogy a ledek 4x2 db kábelét is be kellene forrasztani, egy nagyon pici helyre. Azért, hogy legyen fogalmunk, mekkora helyről van szó, mellékelek néhány képet:
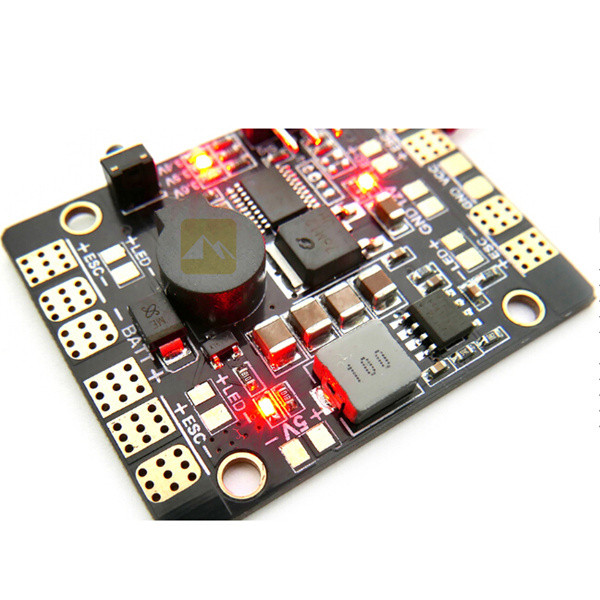


Aki esetleg nem látná egyből, ez egy 46x36 mm-es lapka, ennek a két kb. 3 mm-es 12V ágára kellett volna ráforrasztani a 8 db kábelt, ami nyilvánvalóan képtelenség. Mivel nem volt 18AWG-s kábelem, ezért szétvágtam egy csatlakozóra forrasztott kábelt, ezt beforrasztottam a két pólusra, majd mind a kettő végére felforrasztottam a szétválogatott 2x4 + és - kábeleket, majd az egész kapott egy szép kis zsugorcsövezést. Nem egy clean build, de sajna máshogy nem lehetett megoldani. Utána az ESC-k kábelei is beforrasztásra kerültek, jöhetett a vezérlő bekábelezése.
3. Megszoktam, hogy minden tüskesorra azt dugok, ami éppen tetszik, Naze 32-nél ez nem probléma, majd átvariálom Cleanflightból az egészet. A NAZA M viszont az amerikai The Walking Dead zombijainak készült, ezért ezt egy teljesen hozzá nem értőnek is össze kell tudnia rakni. Ehhez jelentős mennyiségű videóanyag áll rendelkezésre, ami mindent taglal, kivéve azt, hogy melyik csatorna mi is akar lenni. Ezért én megkíméllek titeket attól, hogy a kisujjatokból kelljen kiszopni ezeket:
- A: Aileron vagyis Roll
- E: Elevator vagyis Pitch
- T: Throttle vagyis gáz
- R: rudder vagyis Yaw
- U: módválasztó kapcsoló, GPS/Attitude/Failsafe stb. között
- X1: gimbal 1. csatorna
- X2: gimbal 2. csatorna
- X3: PMU modul, ami egyben VSEN is, vagyis feszültség figyelés, ezen keresztül működik a Low voltage cut (LVC) funkció

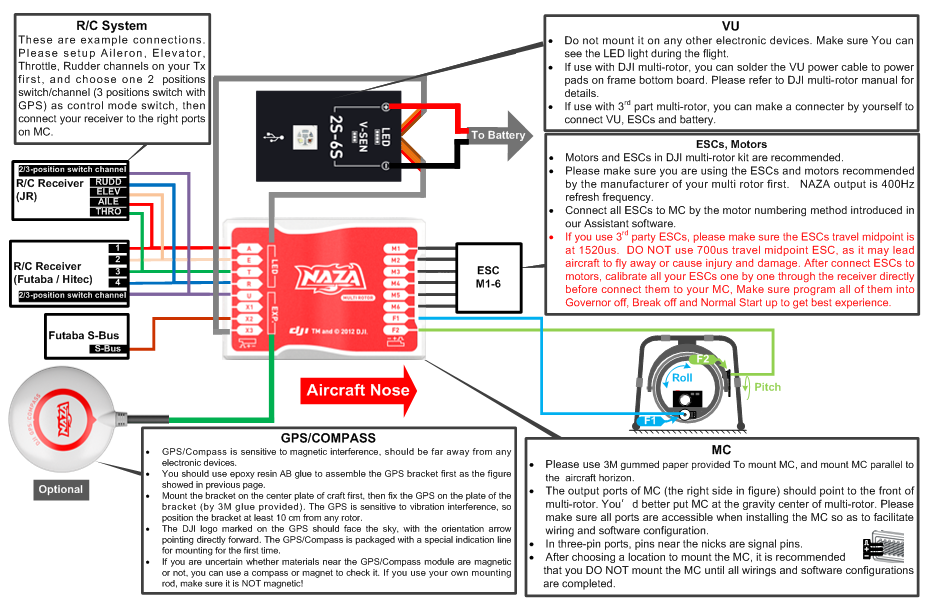



Ezek előredefiniált csatornák, NEM LEHET variálni őket, mindennek oda kell kerülnie, ahová a DJI definiálta. A DJI szervókábelek speciálisak (van lefele egy élük), azért hogy a polaritást ne lehessen felcserélni. A gond csak az volt, hogy az ESC BEC kábelei viszont hagyományosak és feket/fehét színezésűek, nem pedig narancs, piros, sárga színűek. Ez azért volt fontos, mert két motor BEC kábele nem ért el a vezérlő másik oldalához, vagyis egy szervókábelt szét kellett vágnom és beletoldanom a gyáriakba. Igen ám, de melyik pin mit visz át? Hála istennek ebben segít nekünk a vezérlő oldalán elhelyezett jelölés, felülről lefele: barna-piros-sárga: mínusz-plusz-jel. Így egy fölösleges szervókábelt a vezérlő oldalán kivettem a csatlakozóból, kettévágtam, kivettem a piros szálat, majd a barnát a feketével, a sárgát a fehérrel összeforrasztottam a motor oldalon. Ez az oldal némileg logikusabb, mint a vevő oldala felé eső kiosztás:
- M1-M6: a hat motor, ahol a motorsorrend a jobb elsőtől (1-es) óra járásával visszafele van számozva és így is kell feldugni a megfelelő tüskesorra
- F1-F2: gimbal két tengelye
Még egy fontos dolgot kell figyelembe venni, a DJI jelöli a vezérlő irányát egy kis nyíllal, ennek kell a gép orra felé mutatnia. Az első 4 csatorna lett a 3 irány + a gáz, az 5. csatorna a mód választás, de mivel a táv alapból tud még egy 6. csatornát, ezért az X2 csatornát is bekötöttem a 6-os csatornára, ezzel fogjuk majd kapcsolni az IOC funkciót.




4. Most, hogy a vezérlő a helyére került, már csak a vevőt kellett felfogatnom, illetve bedugnom a LED és a GPS modult, majd felragasztani kétoldalú ragasztóval a gép tetejére. Persze néhány simítás hátra volt még, lekötöttem mindent, ami elmozdulhat, áthúztam a PMU fölött és a gép hasa alatt két velcro kábelt, ezek fogják tartani az akkumulátort, illetve felszereltem a lábra a szivacslabdákat, hogy ne pattogjon a gép leszálláskor. Ezzel elkészült a gép, azonban ahhoz, hogy repülhessen, még hátra volt az utolsó lépés, be kellett konfigurálni a vevőt és a távot egymással.
Ezt Flyskys FS-i6 távvezérlő és Flyskys FS-i10 vevő esetén az alábbi módon tehetjük meg:
- a bind kábelt bedugjuk a vevő VBAT pin sorára
- távot bekapcsoljuk
- gépet bekapcsoljuk, majd nyomjuk a távon a bind gombot, amíg meg nem jelenik egy RX felirat a kijelzőn
- gépet kikapcsoljuk, bind kábelt levesszük és kész is, a gép reagálni fog a távvezérlő utasításaira
Ezzel készen is vagyunk, a gép fizikailag röpképes állapotba került, már csak a szoftveres konfiguráció és a fejlesztések vannak hátra. A gép így nézett ki a fizikai összeszerelés után:





Szükség volt még egy méreckedésre, hogy lássuk, elértük-e az előzetesen kitűzött célt. 950 grammra terveztem, üres tömeg 693 gramm lett, 4000mAh Multistar 10/20C akkumulátorral 944 grammot nyom, 5400mAh 20C akkumulátorral pedig 1020 grammot. Ez utóbbi 70 grammal magasabb, mint amivel számoltam, de sajnos a kábelek és a be nem kalkulált NAZA M modulok ennyivel emelték meg az össztömeget.
A sorozat többi része:




