Építsünk együtt III. /videóblog 11. adás/ - a vezérlő
 Folytassuk szörnyszülöttünk körbejárását a vezérlővel. Én - finanszírozási okokból - megvettem a Tarot Naze 32-t ami kb. a legolcsóbb, tokozott vezérlő volt Banggoodon. Nos ez annyira nem bizonyult jó választásnak, mint utóbb kiderült, ugyanis amiért vettem - nem akartam tüskesort forrasztani - az abszolút igaznak bizonyult, cserébe elég speciális kábelekkel sikerült szerelni a drágát, ami okozott némi fejtörést (na jó, némi gányolást:D). Ennek szellemében néhány gondolat a vezérlőkről.
Folytassuk szörnyszülöttünk körbejárását a vezérlővel. Én - finanszírozási okokból - megvettem a Tarot Naze 32-t ami kb. a legolcsóbb, tokozott vezérlő volt Banggoodon. Nos ez annyira nem bizonyult jó választásnak, mint utóbb kiderült, ugyanis amiért vettem - nem akartam tüskesort forrasztani - az abszolút igaznak bizonyult, cserébe elég speciális kábelekkel sikerült szerelni a drágát, ami okozott némi fejtörést (na jó, némi gányolást:D). Ennek szellemében néhány gondolat a vezérlőkről.
Normális ember nem épít Naze 32-re kamera platformot. Aki ilyet akar építeni, az vehet APM, Pixhawk, Tarot XYZ, DJI NAZA, Wookong stb. vezérlőket, de a versenygépekhez szánt vezérlőket - Naze 32, CC3D, KK 2.1, Seriously Dodo, SP Racing stb. - nem javaslom. Mivel az állatorvosi lovunk nem igazán foglalkozik ilyen fenkölt dolgokkal - plusz kell bele egy jó adag szívásfaktor, hogy később tudjak szenvedni a GPS-el, meg egyéb okosságokkal - ezért nálam a már említett Tarot Naze 32 vitorlázott be a képbe.
Követve az előző rész logikáját, átollóztam az áramköri elemek listáját:
- motor : DJI másolat, 2212 920KV
- ESC: SimonK 30A
- váz: Hobbyking SK450
- PDB: Lantian mini PDB
- vevő: Flysky FS-iA6 6 csatornás
- propeller: Gemfan 1038 carbon nylon
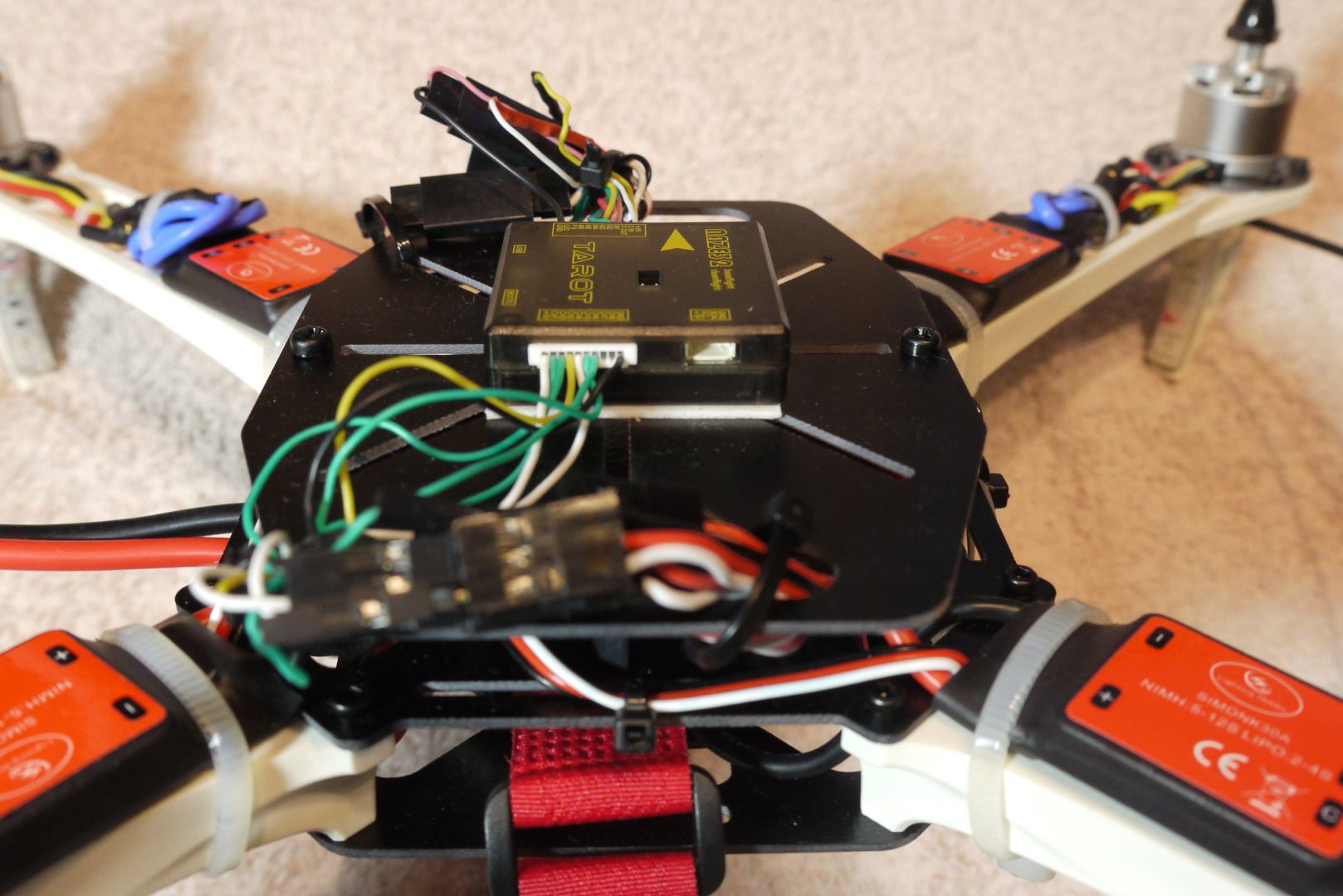
- vezérlő: Tarot Naze 32 6DOF STM32F1
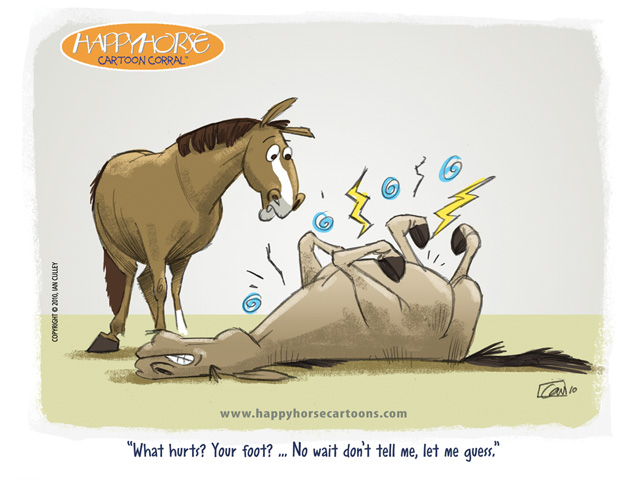
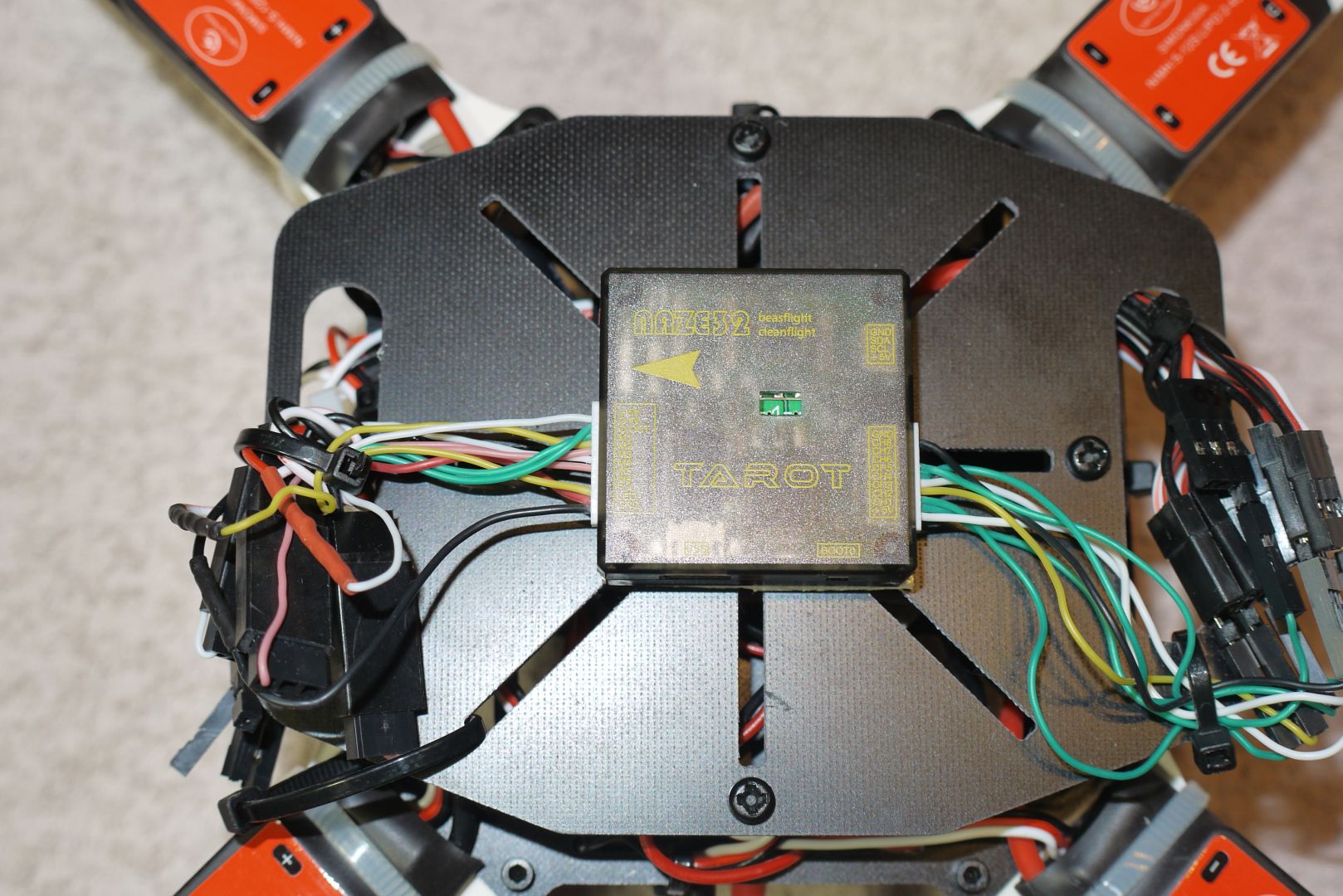
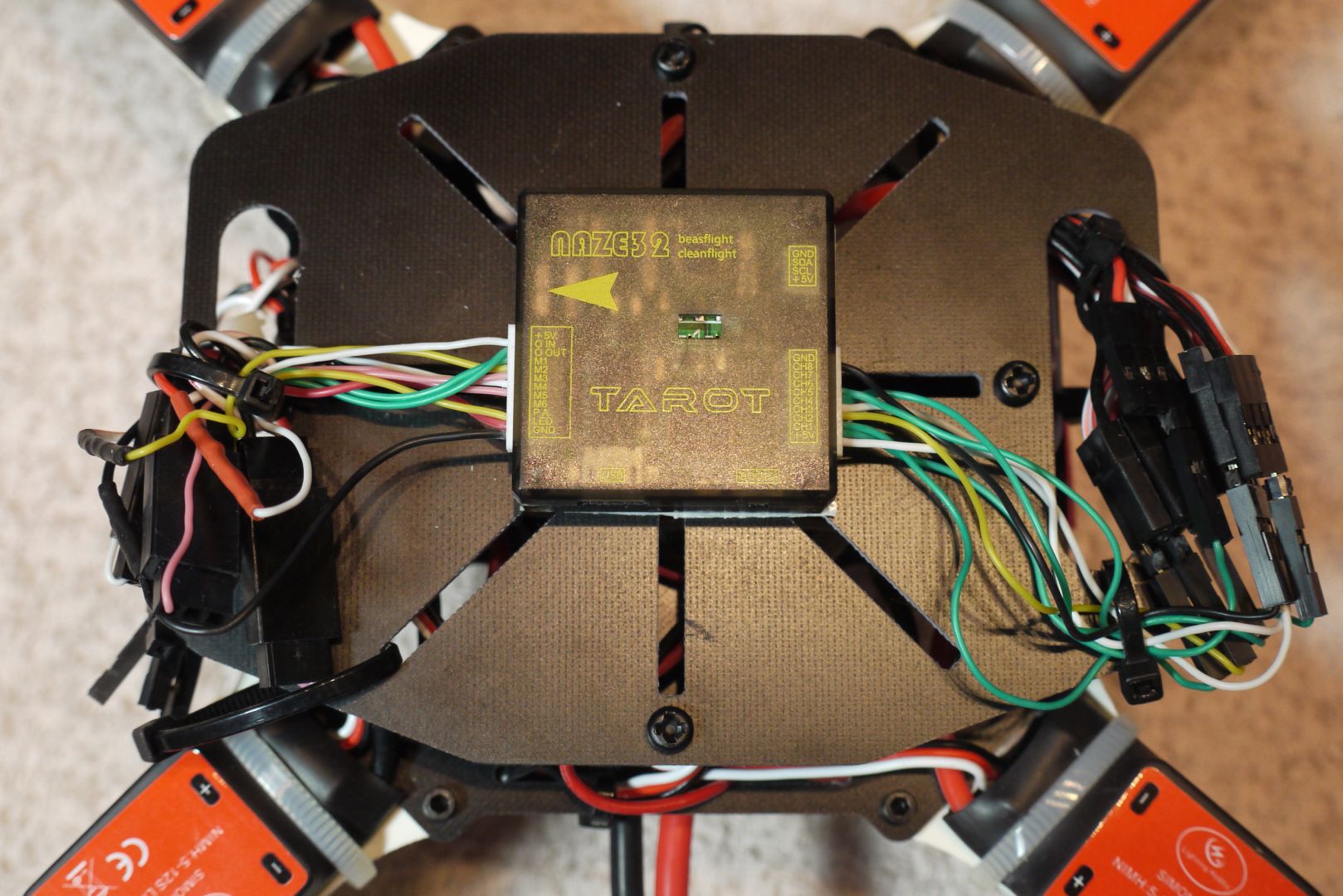
Néhány gondolat a Tarot verzióról, illetve képeken mellékelve egy Emax Naze 32 Advanced 10DOF vezérlő is, összehasonlítási alapnak:
- ez egy olcsó vezérlő, nincs 4.000 Ft
- nem kell tüskesort forrasztanunk
- 1 eres kábeleket adnak, anya csatlakozókkal, ezért elveszítjük annak a lehetőségét, hogy direktben bármivel összedugjuk (hiszen a tüske az apa lenne)
- elvileg van rajta egyéb szenzoroknak - GPS, szonár - bemenet, tehát lehet ilyennel próbálkozni
- van rajta OSD és VBAT port is
Összehasonlításnak képek:




Jöjjön néhány gondolat a vezérlők kiválasztásához, általánosan. Ez a téma egyébként tud speciális lenni, hiszen nagyon függ a felhasználás céljától a "központi agy", tehát ne legyetek restek utána járni a dolgoknak.
A VEZÉRLŐ
- A DOF: degree of freedom, ami a szenzorok számát jelöli. a 6DOF 3 accelerométert és gyrot jelent, a 10DOF pedig +3 magnetométert és barometrikus szenzort, ez utóbbi tudja tartani a magasságát
- Acro, Basic, Advanced stb. jelölések: a gyártók imádják felcímkézni a termékeiket, attól függően, hogy mit tudnak még a vezérlők. Pl. az Emax Naze 32 Advanced 10DOF tudja a 10 szenzoron túl az OSD-t is, az Acro verzió csak az alap szenzorokat tudja stb.
- Tokozott vagy nem tokozott: előbbi ellenállóbb és a tokra ki van vezetve mindenféle csatlakozó, utóbbi viszont könnyebben elhelyezhető, felbakolható, a tüskeirányok nem fixek (tokozott: NAZA M, nem tokozott: Naze 32)
- Tüskesoros vagy nem tüskesoros: kell-e forrasztanunk rá vagy minden szépen beforrasztásra került már a gyárban. Előbbi egyszerűbb de kötött, utóbbi kötetlenebb de szarakodni kell a forrasztással, viszont cserébe mi döntjük el, hogy merre álljanak a tüskék (pl. fel vagy 90 fokban elforgatva), ezért flexibilisebben lehet elhelyezni. A tüskesor apa csatlakozónak minősül, pl. direktben dughatóak rá szervo kábelek
- Kezelt motorok száma: általában a vezérlők 6 motort kezelnek le, ezek az M1-M6 csatornák. Amennyiben ennél több motoros gépet szeretnénk építeni, olyan vezérlőt kell vennünk (NAZA M V2)
- Csatornák száma: minimum 4, de inkább 5 az alap. Itt azért kell gondolkodnunk, mit is akarunk kitenni a maradék csatornákra, vagy ha fordítva nézzük: hány csatornára van szükségünk az alap 5-ön kívül, néhány példa: motor arm, led vezérlés, kamera szervó, felhúzható láb stb.
- Kezelt szenzorok száma: akarunk-e GPS-t a gépre? Esetleg szonárt? Vagy valami mást? Általában a versenygépeken nincs ilyen, de egy kamera platformon biztosan lesz GPS, azt be kell tudnunk kötni
- Gimbal és kamera vezérlés: ahogy a nevében is benne van, legalább 1 csatorna erre is szükségeltetik, de inkább kettő. Komolyabb gépeknél (amivel mi itt a blog jellege miatt nem foglalkozunk) bizony a kamerát is lehet vezérelni
- Egyebek: mérjen-e a vezérlő feszültséget (NAZA M alapból tudja), OSD-t kezeljen-e stb. mennyi a súlya, vannak-e kiegésztő modulok gyárilag a vezérlőhöz mellékelve (NAZA esetén van egy LED és egy PMU modul, ami plusz 30 gramm) és még számtalan más ok lehet, amit figyelembe kell vennünk
Ezek alapján az általam választott vezélrő: Tarot Naze 32 6DOF, tokozott, 6 motort kezelni képes, nem tüskesoros vezérlő, amelynek van OSD és GPS bemenete, illetve képes mérni az akkumulátor feszültséget is.
A sorozat eddig megjelent részei:
- quadkopter.blog.hu videóblogjának 9. adása /1. építős rész/ - a váz és a PDB
- quadkopter.blog.hu videóblogjának 10. adása /2. építős rész/ - a motor és az ESC
- quadkopter.blog.hu videóblogjának 11. adása /3. építős rész/ - a vezérlő
- quadkopter.blog.hu videóblogjának 12. adása /4. építős rész/ - a vevő
- quadkopter.blog.hu videóblogjának 13. adása /5. építős rész/ - az akkumulátor
Ezek a fő szempontok, jöjjön most a videó a fejtágítással:




