Építési napló 2, Stage 1.3.2 - Hibajavítás, korrektúrával
 Kicsit visszakanyarodunk az Ogre Mark II-höz, amelyet nyáron eszkábáltam össze, de még mindig sok vele a teendő. A vázat majdnem kidobtam a kukába, ugyanis hullottak belőle a csavarok. Rezgett az egész gép, csavarodtak a karok, én meg nagyon mérges voltam, hogy egy ilyen hitvány vázat sikerült vennem. Aztán változtak a dolgok, kibuktak bizonyos hibák, amiket alább fogok felsorolni, viszont ezek megoldhatóak, szóval ez mégsem jelentheti a gép végét, lehet, hogy nem is olyan rossz ez a váz, szóval fussunk vele még egy kört.
Kicsit visszakanyarodunk az Ogre Mark II-höz, amelyet nyáron eszkábáltam össze, de még mindig sok vele a teendő. A vázat majdnem kidobtam a kukába, ugyanis hullottak belőle a csavarok. Rezgett az egész gép, csavarodtak a karok, én meg nagyon mérges voltam, hogy egy ilyen hitvány vázat sikerült vennem. Aztán változtak a dolgok, kibuktak bizonyos hibák, amiket alább fogok felsorolni, viszont ezek megoldhatóak, szóval ez mégsem jelentheti a gép végét, lehet, hogy nem is olyan rossz ez a váz, szóval fussunk vele még egy kört.
A rezgésnek több oka is lehet, de hogy pontosan mi volt az, nem derült ki. Volt több lehetőség is, ezeket szépen egyesével fogjuk most kivesézni. Visszakanyarodva a vázra, sajnos be kell hogy valljam, most már a 380-ast venném, a mostani 360-as helyett. Ezt egy olyan, előre nem látható körülmény okozta, ami a gép megépítése után bukott ki. Vettem ugyanis még 6 db ZTW Black Widow motort, Quanum propellerekkel együtt. Sajnos ezen propellerek mérete pont annyival nagyobb, hogy már egymásba érnek a vázon. Elkönyvelhetjük hát, hogy a Gemfan 1038-as propellerei kisebbek, mint ugyan ez a méret karbonból, tehát a 10 col az van aki szerint nem 25,4 cm. Így nem tudom őket feltenni a 360-as vázra, míg a 380-asra jó eséllyel felmennének.
Két lehetőségem van, hagyom így az egészet és így jártam, vagy veszek egy másik vázat, ami 380-as és kicserélem a propellereket. De minek vesződnék az új vázzal, megér-e 20 dollárt pluszban ez az egész történet? Nyilvánvalóan nem, kivéve persze, ha a rezgéseket a hitvány minőségű, hajlékony propellerek okozzák, akkor bizony nincs más választásom. Még nem tettem meg, de honnan fogom tudni, hogy bármelyik másik propeller felfér majd a vázra, már pedig Graupner Thin E-propból nem sok másolat van.
A másik dolog, amit mint hiba elkövettem, hogy a vezérlőt leszorítottam gyorsszorítóval, ami átviszi a rezgéseket. Így levágtam a gyorsszorítót, hogy csökkentsem a rezgéseket, illetve betekertem szigetelő szalaggal a vezérlőt, így nem kaphatnak a belső részek fényt, és a szél fújása sem fogja befolyásolni a magasság szenzort. A vezérlő marad a puha, de erős ragasztón, amin eddig is volt, ez is elég a stabil, egy helyben maradáshoz.
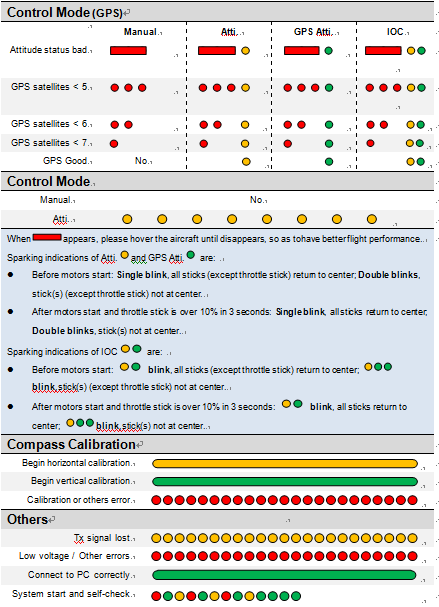
A NAZA M Lite meglehetősen bonyolultan jelzi vissza a különböző állapotokat. Az egyik a GPS állapota vagy éppen annak a hiánya. Ezt onnan lehet tudni, hogy hány piros és hány zöld villogás követi egymást, 5 szatellit alatt 3 piros majd 1 zöld villogás követi egymást, pont úgy, ahogy az én esetemben is volt. Ez ugye nem túl bizalomgerjesztő, különösen azért nem, mert ez az állapot nem is változott, vagyis nem kapcsolt be a GPS mód, így a gép nem is tartotta a pozícióját. Ez bizony baj, hiszen a kameraplatformok sajátossága és alapképessége pont ez lenne, nekem még sem váltott át GPS módba. Nem értettem, mi okozza ezt, ezért megnéztem a gyári leírást az iránytű kalibrációról, ez a NAZA M Lite és a V2 esetében ugyan az a művelet. Bevágom ide is a lényeges részt, amely így szól:
1. When the GPS is abnormal, the Main controller will tell you by the LED blinking Red and Yellow alternately ( ), disable the GPS Module, and automatically enter the aircraft into the ATTI. Mode: ha a GPS abnormálisan működik, akkor ezt a repülésvezérlő jelzi a LED-ek váltott piros és sárga villogásával. Ilyet azonban nem tapasztaltam, tehát a vezérlő nem érzékeli úgy, hogy a GPS modullal probléma lenne. A jelenlegi modul egy Ublox M8N, amivel gondom van. Mi legyen a megoldás? Cseréljük ki egy másik GPS modulra, pl. arra ami az APM-en van. Miért is ne? Pl. azért, mert a DJI-hoz tartozó Ublox GPS 4 eres kábellel csatlakozik, míg az APM két külön csatlakozón 6 eressel, szóval ez jelent némi problémát (az APM-es GPS-ben ugyanis van külön magnetométer is).
 A másik, ami feltűnt, hogy ha levesszük a motorforgást a minimumra (motor idle speed), akkor láthatjuk, hogy a motorok nem egyszerre pörögnek fel, ami baj, hiszen kalibrálni kellene az ESC-ket, hogy szépen, szinkronban induljanak el (az egyik motor kb. 30% gázra kezd csak el forogni). Ehhez azonban több dolog kell, az első, hogy a vezérlőről lehessen állítani az összes ESC-t, de ilyet a NAZA M-Lite szoftvere nem tud. Mit lehet ilyenkor tenni? Sok mindent, de ehhez meg kell tudnunk néhány dolgot (amit most nem írok le, hogy hogyan derítettem ki, de volt némi matek, mire meglettek):
A másik, ami feltűnt, hogy ha levesszük a motorforgást a minimumra (motor idle speed), akkor láthatjuk, hogy a motorok nem egyszerre pörögnek fel, ami baj, hiszen kalibrálni kellene az ESC-ket, hogy szépen, szinkronban induljanak el (az egyik motor kb. 30% gázra kezd csak el forogni). Ehhez azonban több dolog kell, az első, hogy a vezérlőről lehessen állítani az összes ESC-t, de ilyet a NAZA M-Lite szoftvere nem tud. Mit lehet ilyenkor tenni? Sok mindent, de ehhez meg kell tudnunk néhány dolgot (amit most nem írok le, hogy hogyan derítettem ki, de volt némi matek, mire meglettek):
- Milyen ESC-nk van pontosan?: ZTW Spider Lite V2?
- Milyen szoftver fut az ESC-n? Blheli
- Atmel vagy Silabs chipes az ESC? Atmel, erről a listáról elérhető
- Milyen szoftverrel lehet konfigurálni az ESC-t?: Blheli
- Hogyan lehet konfigurálni az ESC-t?: Afro USB programming tool
A fenti adatokat csak valószínűsíthetem, mert nincsen igazán jól ledokumentálva a dolog,ebből is látszik, milyen fontos az, hogy minőségi gyártók dolgait vegyük meg, ahol van normális leírás. Az egész kulcsa ez a pici kütyü:
A fenti USB tool-al közvetlenül a jelkábelen lehet konfigurálni az ESC-ket, anélkül hogy forrasztanunk kellene, ami igen kellemes, de persze nincs itthon ilyenem, tehát rendelni kell. Itt tart most a történet, jelentkezem, ha elvégeztem a beállításokat, addig meg kitartás.
A sorozat többi része:




