Multikopter kifejezések és rövidítések
![]()
Multikopter röviditések: ebben a rovatban találod meg azokat a fogalmakat és rövidítéseket, amelyekkel gyakran találkozhatsz a különböző leírásokban és hirdetésekben. Sok esetben nem lehet őket megfelelő módon átfordítani angolról magyarra, ezért az eredeti kifejezést meghagytam.
Ha találok egy új kifejezést, folyamatosan bővíteni fogom a listát.
ARF (Almost Ready to Fly): majdnem repülésre képes kiadás. Ez azt jelenti, hogy valami a kibontás után még hiányozni fog ahhoz, hogy a kopterrel repülni tudjunk, általában egy távirányító vevőt kell a kopterbe építeni.
Ball bearing: golyós csapágyazású motor. Strapabíróbb, de drágább, mint a rézgyűrűs csapágyazás.
BNF (Bind and Fly): párosítsd össze és repülj. Ez a kiszerelés akkor szokott érdekes lenni, amikor a gép több, különböző típusú távirányítóra is felprogramozható, ilyen pl. a Walkera QR X350-es modellje (DEVO távirányítók).
Brushed motor: szénkefés motor, ez az olcsóbb típus.
Brushless motor: szénkefe nélküli motor, ez a drágább típus.
C érték: kapacitás érték, amely jellemzően 20 körül van (jobbak esetében 30-40 is lehet). A C érték megmutatja, hogy mekkora az a névleges kapacitás, amit képes az akkumulátor rövid ideig leadni. Jellemzően a racer típusú gépeknél az érték magasabb, 30-50 közötti, míg a stabil kamera platform gépek esetében alacsonyabb.
CCW motor (counter-clockwise): óra járásával ellentétes irányba forgó motor.
Coreless motor: "mag nélküli" motor, olyan speciális motor, amelyet arra terveztek, hogy minél gyorsabban fel tudjon pörögni. Hátránya a rossz hűtési potenciál (magyarul: melegszik)
CW motor (clockwise): óra járásával egy irányba forgó motor.
ESC (electronic speed controller): elektronikus sebességszabályzó egység.
FPV (First Person View): olyan elsőnézetes multikopter, amely gyárilag tartalmaz a kép nézéséhez szükséges képernyőt, általában a távirányítóján keresztül vagy a képet egy mobileszközre (telefon, tablet) játssza át. A komolyabbak virtuális szemüvegre is ki tudják játszani a képet (pl. Fat Shark).
Gimbal: elektronikus kamera stabilizátor. Általában a tengelyszámmal jelölik (1 axis, 2 axis, 3 axis) azt, hogy a Gimbal melyik irányba tud stabilizálni (elektromotor kompenzálja a gép mozgásából és a motorok rezgéséből adódó negatív képhatásokat, pl. remegés).
Hexacopter: 6 motorral rendelkező multikopter.
Lipo: Lithium polymer akkumulátor rövidítése.
Octocopter: 8 motorral rendelkező multikopter.
PNP/PNF (Plug and Play/Fly): olyan kiszerelés, amit neked magad kell összeraknod a megfelelő szerszámokkal.
RTF (Ready to Fly): kibontás után röpképes, mindent tartalmaz ahhoz, hogy egyből repülni tudjon. A legtöbb modell ilyen. Általában az akkumulátor annyi töltést tartalmaz, hogy behelyezés után ki tudjuk próbálni, hogy a gép működik-e. A távirányítóba való elemek SOHA NEM a csomag részei, ezeket mindig nekünk kell bele tennünk.
S érték: az akkumulátorokon jelölni szokták azt, hogy hány cellából állnak. A kisebb kopterek jellemzően 3.7V-os feszültségű 1S-es akkumulátorokkal vannak felszerelve. Minden újabb cella növeli a feszültséget, a 2S 7.4V, míg a 3S 11.1V és így tovább.
Y6: olyan hexakopter, amelynél a motorok egy Y vázon helyezkednek el, páronként egymás alatt. Ilyen modell pl. a Cheerson CX-33.
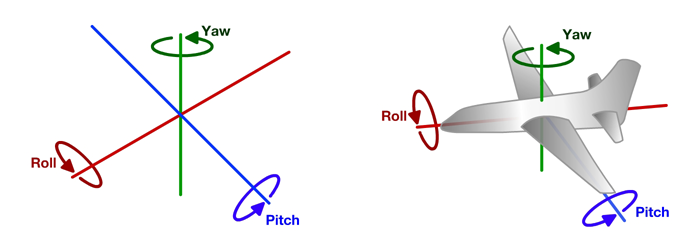
Repülésből származó kifejezések (fontos, hogy a multikoptereknek nincsen szárnyfelületük, amelyekkel a repülési tulajdonságaikat szabályozzák, helyette a propellerek forgási sebességével, forgási szögével vagy forgásirányával történik a szabályzás, de a repülésből származó kifejezések sok helyen megmaradtak (pl.: yaw rate).
Aileron: az a szárnylapát, amely a roll értékét szabályozza, vagyis hogy a repülő jármű mekkora mértékben fordul el a hossztengelye mentén.
Elevator: az a vízszintes faroklapát, amely a pitch értékét szabályozza, vagyis hogy a repülő jármű milyen értékben emelkedik vagy süllyed.
Rudder: az a függőleges faroklapát, amely a yaw értékét szabályozza, vagyis hogy a repülő jármű mekkora szögben fordul el horizontális irányban.
Pitch (szoktak Pitchként is hivatkozni rá): az a mérték, amekkora szögben egy repülő emelkedni vagy süllyedni tud.
Roll (szoktak Aileronként is hivatkozni rá): az a mérték, amekkora szögben egy repülő jármű a hossztengelye mentén el tud fordulni vertikális (függőleges fel le) irányban.
Yaw (szoktak rudderként is hivatkozni rá): az a mérték, amekkora szögben egy repülő jármű valamelyik irányba el tud fordulni horizontális (vízszintes oldal irány) irányban.
Forrás: http://howthingsfly.si.edu/flight-dynamics/roll-pitch-and-yaw
Multikopterek funkciói
3D fly: hangzatos név, amelyet a gyártók általában a kopter nevében is megjelenítenek (pl.: Blade Nano QX 3D). Lényege hogy a gép tud fejjel lefele is repülni a forgásirány megfordításával (olcsóbb megoldás) vagy a rotorlapátok állásszögének megváltoztatásával (drágább megoldás).
Air pressure sensor: légnyomás figyelő szenzor, amivel a kopter képes a pozícióját függőlegesen tartani (tulajdonképpen az Altitude Hold funkció függőlegesen). Ilyen funkciója van a Cheerson CX-33-nak.
Automatic Return/RTH/RTL (return to home/launch): A gép megjegyzi a felszállási GPS koordinátákat és a távirányítón elhelyezkedő gomb vagy más, előre beállított esemény hatására visszatér oda.
Flip: "bukfenc", a kopter képes a saját tengelye körül 360 fokos fordulatot tenni.
Fail-safe (low voltage protection): biztonsági funkció, amely a drágább gépekre jellemző. Lényege, hogy egy előre kiválasztott eseményre (triggered event) a kopter reagál valamit, amit előre meghatároztunk. Pl. az akkumulátor feszültségének csökkenésekor visszatér az irányítójához vagy egyszerűen landol, így nem veszítjük el a gépet (kivéve mior a Fail-safe egy tó fölött kapcsol be és a kopter szépen "leszáll" rá).
Follow Me: követési funkció, amelynek lényege, hogy a drón követi a jelet sugárzó eszközt GPS vezérléssel. Így lehet pl. különböző, általunk űzött sporttevékenységeket automatikusan felvenni.
Headless: alapértelmezetten a multikopterek az irányultságukat a távirányító helyzetéhez képest határozzák meg. Ez azt jelenti, hogy ha a távirányítóhoz képest ha a kopter megfordul (mert pl mi a távirányító karjával körbe forgatjuk 180 fokkal), akkor az irányok felcserélődnek. A headless mód esetén mindegy, hogy a távirányító és a kopter merre áll, mindig arra mozog a jármű amerre a vezérlő karokat mozdítjuk, feltéve, hogy a távirányító helyzetét nem változtatjuk meg.
Mode1/2: távirányító beállítás, általában a Mode 2-t szoktuk alapértelmezettnek tekinteni, ahol a bal oldali kar a teljesítményt és a forgást, a jobb oldali kar az irányváltásokat vezérli, a Mode 1 pedig fordítva. Ezt a két módot sok távirányítónál fel lehet cserélni.
One key take off/landing: automatikus fel és leszállás, a kopter nagyjából egy méter magasságig automatikusan felemelkedik és leszáll (pl. XK Detect X380).
Stable mode: stabil mód, a kopter GPS pozíciót tart a levegőben megadott magasságban és irányban.
Telemetric system: telemetrikus rendszer, amely különböző, a repüléshez tartozó adatokat - repülési sebesség, magasság, megtett út, akkuállapot, szélerősség stb. - visszaírja a távirányító kijelzőjére.
IOC (intelligent orientation control): intelligens irány érzékelés. Lényege, hogy a multikopter tudja, hogy a gép merre áll a felszállás pillanatában. Amikor az IOC bekapcsol, akkor az orientáció mindig ugyan abba az irányba mutat, függetlenül attól, hogy a gép elfordul-e a levegőben vagy sem (normális esetben az irányok egy 180 fokos elfordulásra felcserélődnek). Ez akkor hasznos, amikor a gép pörgésbe kezd és nem látható melyik az eleje és a hátulja. Az IOC-t próbálják meg az olcsóbb gépek a Headless funkcióval imitálni.
Circle hoovering (körkörös körözés): a funkció segítségével a kopter képes egy adott pont körül körözni. Itt a kezelő a kör rádiuszát adja meg, amely körül a kopter a levegőben elfordul. Panoráma képek, körkörös videó léterhozására alkalmas.
GPS hold: GPS pozíció alapját a gép tartja a helyzetét a levegőben a következő utasításig.
Follow me: követés funkció, a gép követi a távirányító elmozdulását.
Ajánlom továbbá a www.prohardver.hu drón topicjának bevezető hozzászólását, amely kifejtve taglalja a fenti dolgokat.
MŰSZAKI ELEMEKHEZ TARTOZÓ KIFEJEZÉSEK
FC (flight controller v. flight controller board): repülés vezérlő vagy repülési vezérlő lapka.
KV érték: A motorokon található érték, amely meghatározza, hogy 1V feszültségnövekedés hatására a motor fordulatszáma mennyivel emelkedik. Pl. 2200KV azt jelenti, hogy 1 V hatására a motor 2200 fordulattal fog gyorsabban forogni percenként.
PWM (pulse width modulation): pulzus szélesség moduláció.
5030, 5040, 5045 stb.: propellereknél található számozás. Az szám első fele a propeller hosszát adja meg inchben (pl. 50= 5 inch vagyis 12,7 centiméter) a második fele a propeller legnagyobb dőlését adja meg, ami kifejezi, hogy egy fordulatra mekkora emelőerőt fejt ki a propeller (magasabb érték=nagyobb emelő erő).
OSD (on screen display): bizonyos repülési adatok (pl. a távirányító helyzete, telemetria stb.) visszaírása a képernyőre.
UTOLJÁRA BŐVÍTVE 2015.12.28




