Konfigurálás Baseflighttal I. - Emax Nighthawk alapbeállítások

FRISSÍTVE: 2016.04.08.: néhány aprósággal kiegészítve
Végre eljutottam addig, hogy legyen fél órám állítgatni az Emax Nighthawk Pro 280-amat és a DJI F330-amat. Aki esetleg nem tudná, a Flight controllerek szinte mindegyikét, amelyik komolyabb gépben található (a szénkefésekét persze nem) lehet paraméterezni az igényeknek megfelelően. Mi több, ha nem RTF verziót, hanem pl. ARF-et veszünk, akkor KELL IS állítanunk rajta, mielőtt fel tudunk szállni vele. Ehhez azonban szükség van egy Configurator programra, mint pl. a Baseflight...
Ahhoz hogy a gépet paraméterezni tudjuk, nem kell mást tennünk, mint megkeresnünk a vezérlőn a micro USB portot és összekötnünk a számítógépünkkel. A Baseflightot az alábbi linkről tudjuk letölteni, ez egy Chrome böngészőbe épülő kiegészítő (addon), pont ugyan úgy, ahogy a Cleanflight is:
Miután elindítjuk a configuratort, bal felül láthatjuk, hogy képes-e csatlakozni a kopterünkhöz vagy sem. Nekem ezzel volt többször is gondom, a szoftver többszöri újraindítása, illetve a táp lehúzása szokott segíteni. Azt fontos tudni, hogy nem kell az akkumulátort rádugnunk a gépre ahhoz, hogy a vezérlő működni tudjon, elvileg az USB 5V-járól is kap tápot, csak éppen az ESC-ket és a motorokat nem fogjuk tudni elindítani (de mondjuk paraméterezni éppenséggel lehet). Az a lényeg, hogy a Baseflight az USB portot COM portként kell hogy lássa, ha látszik a port, akkor fogunk tudni csatlakozni. Amit még észre kell vennünk a kezelőfelületen, az a jobb felső sarokban látható kis piktrogrammok. Minden egyes zöld színű rövidítés azt jelenti, hogy az adott modell ezekkel a szenzorokkal rendelkezik, míg a pirosak értelemszerűen azt, hogy azokkal nem. Az alábbi rövidítéseket találhatjuk jobb felül:
- Gyro: giroszkóp, a gép stabilitásáért felel, minden modellben van
- Accelero: gyorsulásmérő, minden modellben van
- Mag: magnetométer, vagyis iránytű
- Baro: barometrikus szenzor, légnyomást mér, magasságtartásra használatos (pl. Naze 32 vezérlő)
- GPS: helymeghatározó szenzor (minden komolyabb kamera platform)
- Sonar: ultrahang szenzor, tárgyelkerülő rendszerekben használatos (pl. Phantom 4)
 Fontos, hogy én sem tudom az összes funkció jelentését és ennek a cikknek sem az a célja, hogy egy magyar nyelvű kézikönyv jöjjön létre, vagyis azt a funkciót hagyjátok békén, amit nem említek vagy a saját felelősségetekre állítgassátok.
Fontos, hogy én sem tudom az összes funkció jelentését és ennek a cikknek sem az a célja, hogy egy magyar nyelvű kézikönyv jöjjön létre, vagyis azt a funkciót hagyjátok békén, amit nem említek vagy a saját felelősségetekre állítgassátok.
SETUP MENÜ
Az első menüpont, ahová a program betöltődik a Setup menü. Nagyon fontos fül, ugyanis itt kell a megnetométert, illetve a gyorsulásmérőt beállítanunk. A program és a gép akkor működik együtt, hogy ha a gép megemelésével a gép ábrája elmozdul. 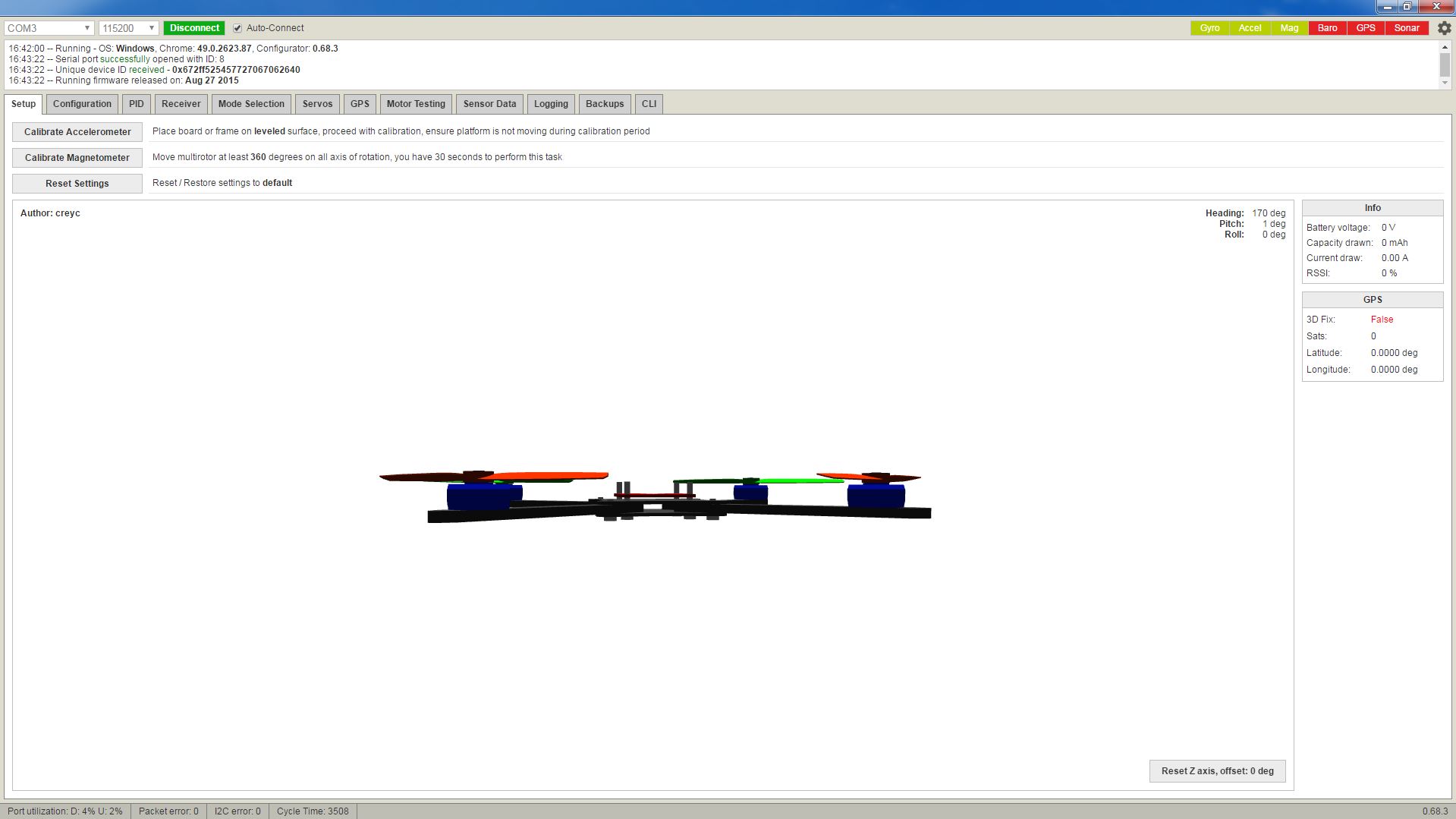
Az accelerométer esetében egy teljesen sík felületre kell helyeznünk a gépet, majd várnunk, amíg a státuszsorban bal felül azt az üzenetet nem kapjuk, hogy a kalibráció elkészült. A magnetometer beállítása egy fokkal bonyolultabb művelet, ugyanis a kalibráló gomb megnyomása után 30 másodpercünk van, hogy a gépet körbe forgassuk a saját tengelye körül vertikális és horizontális irányban is, 360 fokban. Ez tud problémás lenni, én adtam már elő saját magamon lightosabb bondage szexfilmet, ahogy forgattam a gépet, a kezemre tekerve a kábeleket. Ez akkor különösen mókás, ha sikerül közben kihúznunk az USB portból a kábelt, ilyenkor a folyamat megáll, kezdhetjük előröl az egészet.
Azt tudni kell, hogy az, ami számunkra az előre irány, a vezérlő szempontjából nem biztos hogy az. Általában a gyártó jó fej és jelöli az északi irányt (a képen a kis nyilat kell nézni a vezérlőn), illetve a micro USB portot is jellemzően a dél felé mutató oldalra szokták felintegrálni (de persze nem mindig), szóval ebből lehet következtetni a vezérlő helyzetére. Ami fontos, hogy a vezérlő beállításánál az az alapeset, hogy észak felé néz, ezt viszont nem lehet mindig betartani, mert a váz pl. takarná a portokat, ezért valahány fokkal (általában 90 vagy 180) elforgatva kerül a kopterre. Ez később fontos lesz, egyelőre csak jegyezzük meg, hogy ez így van. A setup menüben nem nagyon kell mást állítgatni, persze menthetjük vagy visszatölthetjük a vezérlő beállításait, de ennek a repülés szempontjából most nincs jelentősége.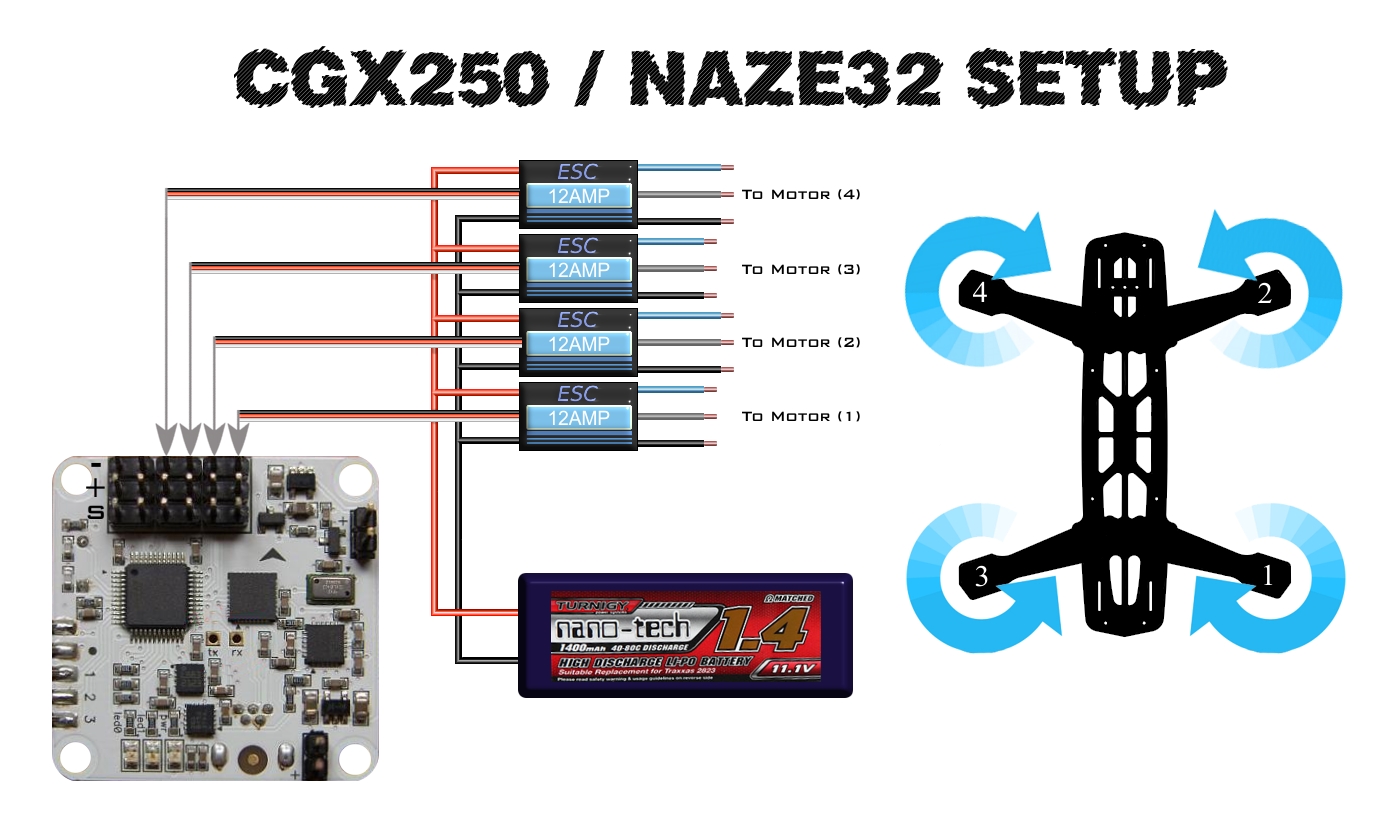
CONFIGURATION MENÜ
Az egyik legfontosabb menü, amin nyomkodhatjuk a gombokat. A bal felső sarokban a Mixer menüpontnál a vázelrendezést tudjuk állítani, ez legtöbbünk esetében X4 az elrendezés, de lehetne sok minden más is, illetve itt láthatjuk a motorok forgásirányát, ezt nem nagyon szoktuk állítgatni (ha jól vannak bekötve:D). Ellenben a Throttle értékek fontosak, amit úgy kell elképzelnünk, mint egy három állású skálát. A skála értékei nem egyenlőek a fordulatszámmal, pusztán azt határozzák meg, hogy hol van a minimum, a közép és a maximum érték a távirányító gázkarján. Azért sem lehet meghatározni a fordulatszámot, mert a vezérlőnek fogalma sincsen arról, hogy pl. milyen akkumulátorról kapja majd a tápot, illetve, hogy milyen propellereket fog forgatni. A fenti skála az alábbi értékekből tevődik össze:
- minimum throttle: az a minimális sebesség, amivel forogni fognak a motorok élesítés után (ha aktiváljuk ezt a funkciót). Nekem ez az érték 1150-re volt állítva de visszavettem, 1050-re, hogy a bekapcsolás után kisebb sebességgel forgassák az ESC-k a motorokat
- middle throttle: mennyivel forogjanak a motorok, amikor a távirányító karja középállásban van
- maximum throttle: a maximális forgási szám, teljes gázadásra
A Failsafe throttle azt határozza meg, hogy ha bekapcsol a failsafe funkció, a gép mennyivel forgassa a propellereit. Ezzel szépen le tud szállni a gép, probléma esetén.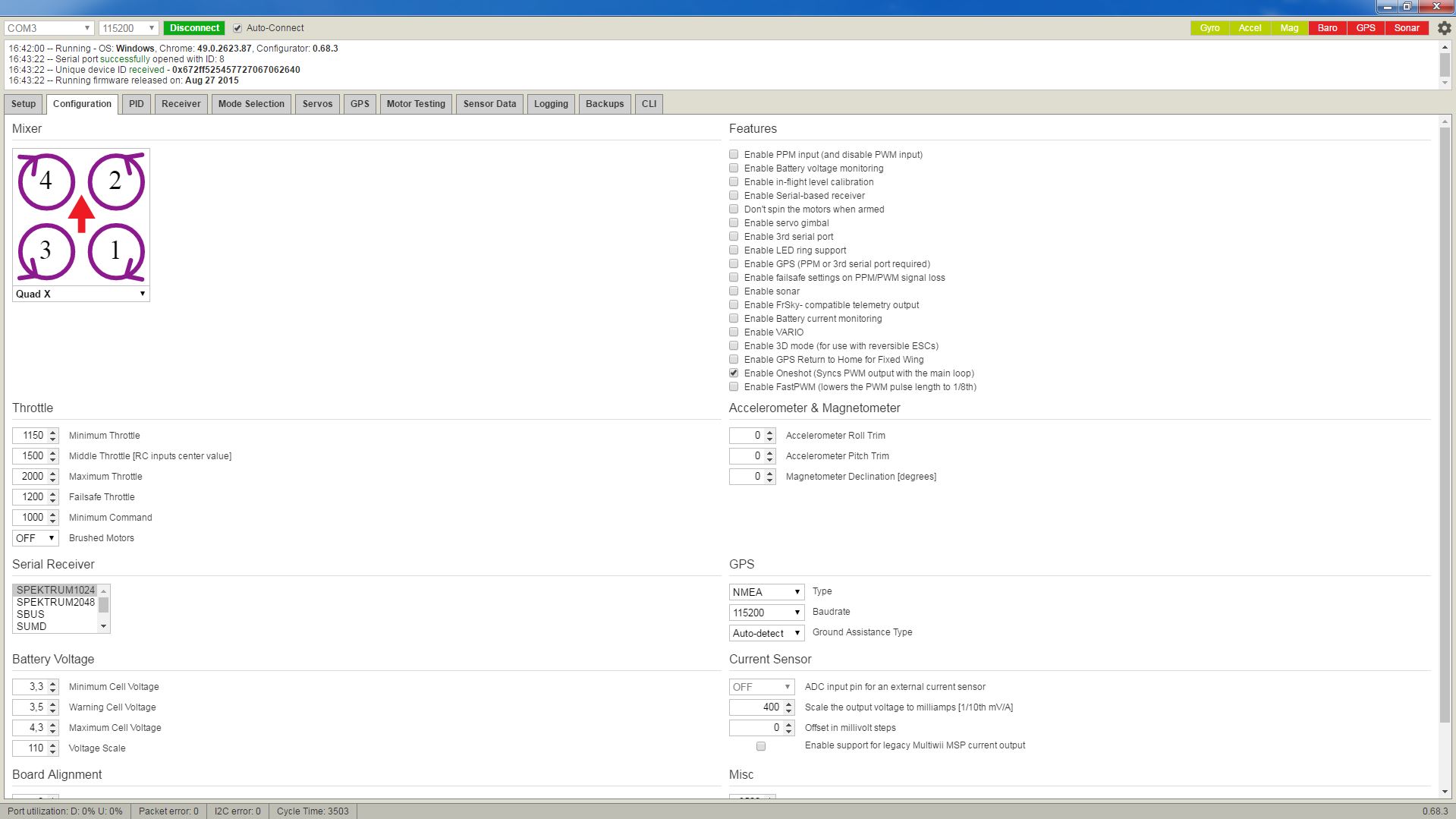
Lejjebb látjuk a Battery Voltage mezőket, ez tulajdonképpen egy két állású LVC warning funkció (alacsony feszültségre riasztást ad egy kimenő portra). A Naze 32 vezérlők tudnak fogadni buzzert, amelyet a VBAT port bekötésével tudunk aktiválni (erről majd egy másik cikkben), ilyenkor a gép hangjelzést ad az akkumulátor feszültségesése kapcsán. Ez azért persze nem ilyen egyszerű, ugyanis ehhez ki kellene tudnia olvasni a vezérlőnek a cellák feszültségét, ezért van szükség a VBAT portra. Ezt úgy tudjuk ellenőrizni, hogy ha visszalapozunk a Setup fülre, akkor jobb oldalt látnunk kell az akkumulátor értékeit. Nekem jelenleg 3.5/3.7/4.3V-ra van beállítva a Battery Voltage, azért hogy ha elkezd diszkréten csipogni a gép, akkor tudjam, hogy nagy gyilkolásokat nem szabad csinálni (pl. full gázról fékezés, vagy full gázzal felküldeni az égbe), mert ez lerántja a feszültségértéket, ne adj isten a gépet is.
A Board alignment a vezérlő elhelyezkedése fokban. Ahogy már feljebb említettem, ha el akarjuk forgatni a vezérlőt, ezen kell állítanunk, óra járásának megfelelően. Vagyis ha a gép eleje tőlünk balra áll és látjuk az USB portot, a vezérlőt 90 fokkal forgattuk el és így tovább.
A features listában a különböző ki és bekapcsolható funkcióit láthatjuk a programnak (és nem a vezérlőnek, mert azt nem látjuk, hogy mit kezel le). Az egyes funkciók az alábbiak (a lista szerint sorban):
- PPM bemenet engedélyezése és PWM letiltása (lásd távirányítós cikkek)
- Akkumulátorfeszültség figyelésének bekapcsolása. Ha ez tiltva van, a gép nullának veszi és veszett vonyításba kezd a buzzer, ha fel van dugva
- Inflight-level: nem tudom mi:D
- Serial-based receiver: serial busos vezérlők bekonfigorálása
- Dont spin the motors: Ne pörgesse fel a motorokat, ha élesítve van a gép (lent bővebben)
- Gimbal szervó engedélyezése: ahol van gimbal ott kapcsoljuk be
- 3. serial port engedélyezése
- LED világítás vezérlése
- GPS engedélyezése (PPM vagy a 3. serial port engedélyezése az előfeltétele)
- Bekapcsolja a Failsafe állapotot, ha jelveszés áll be (lásd lejjebb)
- Szonár engedélyezése
- Frysky kompatibilis telemetria adatok engedélyezése
- Akkumulátor áramértékének monitorozása
- Enable Vario: passz
- Enable 3D mód: az olyan ESC-k esetében, amelyek képesek megfordítani a forgásirányt, engedélyezhetjük, hogy a gép fejjel lefele is repüljön, feltétele a BLheli FW és a Oneshot125 az esc-ben, engedélyezni kell (pl. XK Stunt 350)
- GPS alapú Return to home képesség bekapcsolása merevszárnyú repülőgépekhez
- Oneshot ESC funkció engedélyezése, bővebben ebben a cikkben
- FastPWM engedélyezése, gyorsabb ESC mintavételezést tesz lehetővé
A fentiek közül én az alábbiakat kapcsoltam be a Nighthawkhoz: akkumulátor feszültség monitorozása, Oneshot engedélyezése, illetve kikapcsoltam azt a funkciót, ami miatt NEM pörög fel a motor élesítésnél.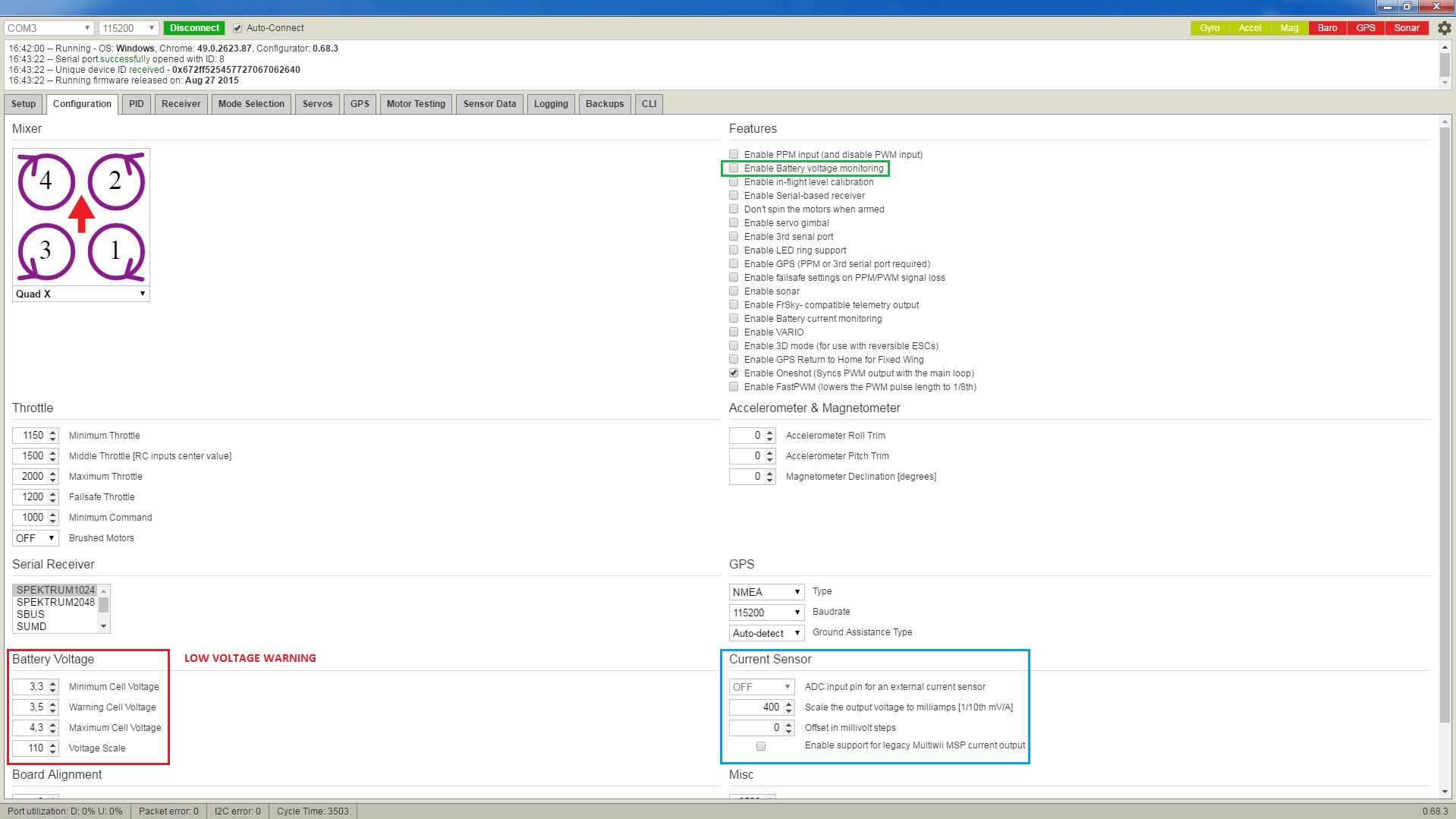
Két dologra szeretnék egy kicsit kitérni, ez pedig a "don't spint the motors" illetve a failsafe működése. A "dont spin the motors" funkció bekapcsolása esetében, az élesítés után (ami a Nighthawk esetében 3 másodpercig jobbra lehúzott gázkart jelent) nem pörögnek fel a motorok, vagyis nem látszik hogy a gép armolva van. Én ezt nem nagyon szeretem, mert még kezdőnek tartom magam és nagyobb biztonságot ad, hogy ha látom, hogy a gép élesítve van, viszont sokan nem szeretik, ha a motorok fölöslegesen pörögnek. Nálam azonban mind a két brushless gép egy távirányítóra van rákötve, ezért akaratlanul is előfordulhatna az, hogy véletlenül a másik gépet élesítem, mert pl. figyelmetlenül nem húzom le róla az akkut vagy hasonló. Ezért azt találtam ki, hogy mind a két gépnél bekapcsolom a motorpörgetést, csak hogy a DJI F330-nál ez a funkció Cleanflight alatt nem működött. Ilyenkor hogyan lehet ellenőrizni, hogy a gép élesítve van-e? Úgy, hogy mivel a giroszkóp ilyenkor is kompenzál a vízszintes pozícióhoz képest, tegyük le egy kicsit ferdén a gépet felszállás előtt, ilyenkor azon az oldalon, ahol a motorok lejjebb vannak, az elektronika elkezdi forgatni a motorokat, hogy kikompenzálja a magasságkülönbséget. Így akkor is látjuk az élesítést, ha a propellerpörgetés funkció valamiért nem működik.
A másik fontos dolog, a failsafe. A failsafe állapot akkor áll be, ha a táv és a gép között megszakad a kapcsolat. Ez a funkció a Nighthawkon is működik, a buzzer ilyenkor elkezd vonyítani, mint az állat. Ha kikapcsoljátok a távot a földön, akkor látható, hogy pár másodperc múlva a vezérlő visszaveszi a fordulatot, vagyis bekapcsol a failsafe. Ha nincs failsafe, a gép általában a megszakadás pillanatában kapott utolsó parancsot ismétli, ami különösen izgalmas akkor, ha éppen full gázzal repültünk. Ha szerencsénk van, akkor a vezérlő előbb utóbb magától leállítja a motorokat, ha nem, akkor visszarepül a gép Kínába:D
Az Accelero&Magnetometer szekcióban a gyorsulás és magnetométert állíthatjuk utána, ha egy kicsit a gép "kúszna", míg a GPS szekcióban a GPS-el rendelkező gépeket kalibrálhatjuk (ezzel nincs tapasztalatom). A current szenzor pedig a már említett áramfogyasztás figyelése funkcióhoz tartozik.
RECEIVER MENÜ
A PID Tuning menüpontot nagyvonalúan átugrottam, mert a téma önmagában megér egy cikket és meglehetősen bonyolult, ezért az alapbeállítások között nem térnék rá ki, ugorjunk a Receiver fülre.
A receiver meglepő módon a távirányító által a vevőre juttatok jelek tesztelésére szolgál. A távirányító karjaival és a kapcsolók mozgatásával ellenőrizhetjük, hogy azok megfelelően működnek-e illetve, hogy a configuration menü throttle szekciójában beállított értékek (nálam 1050/1500/2000) stimmelnek-e. Ami még fontos, hogy a többállású kapcsolók is így működnek, tehát az 1-es állás a minium, a 2-es állás a középérték stb. 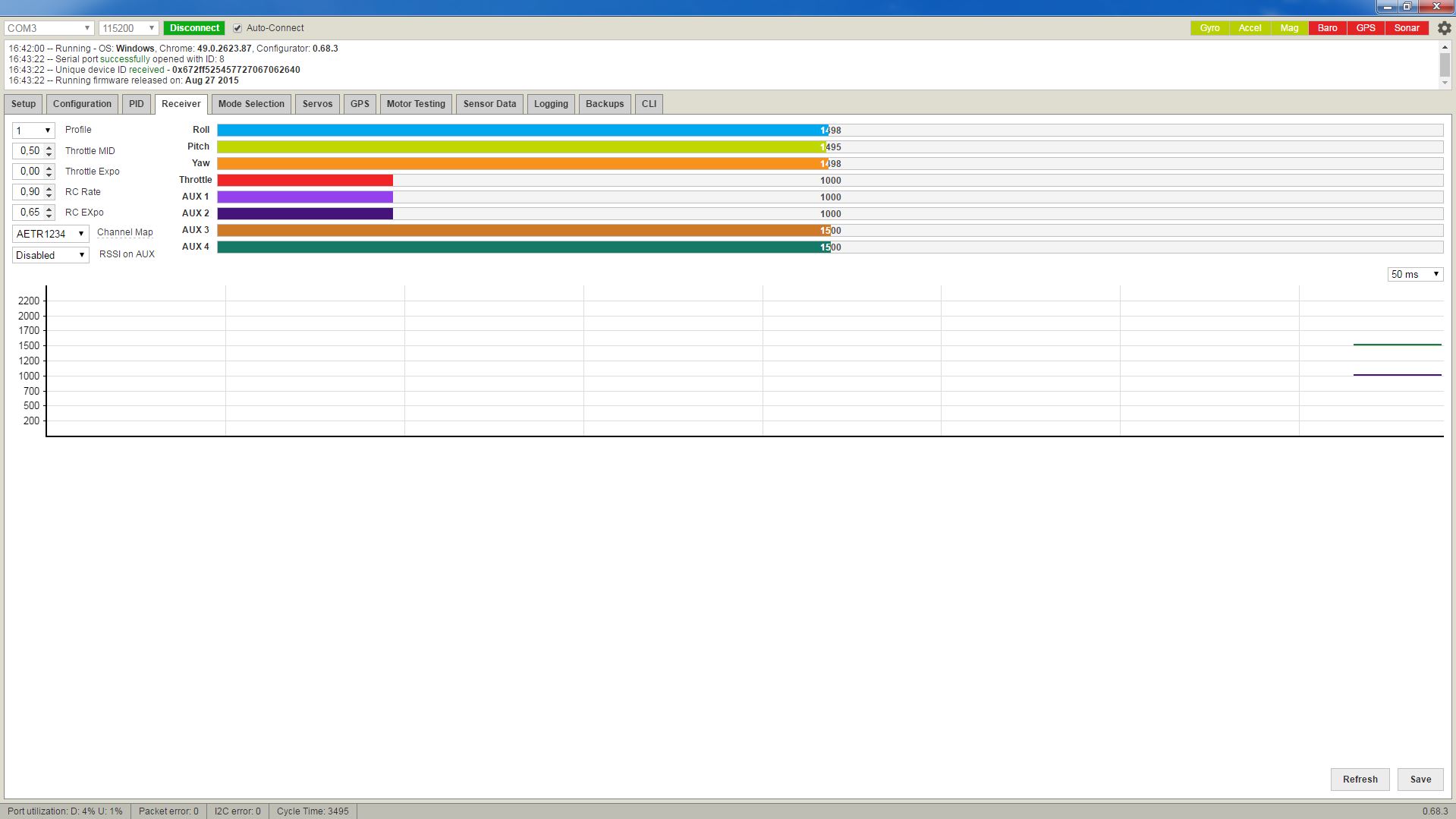
Amit még itt meg kell említeni, bár az én képernyőkivágásomon nem látszik, azok a különböző expo értékek. Alapbeállítás szerint a gázkar mozdítása alapján lineárisan növekszik a fordulatszám. Ha ezt a görbét eltérítjük, akkor tudunk állítani azon, hogy milyen legyen a karhúzás karakterisztikája. Ha a végponthoz képest beljebb húzzuk a végállapotot, kisebb úton adja le az erőt (görbe meredekebb lesz), ha a elnyújtjuk, lassabban (görbe laposabb lesz).
A receiver menüben be tudjuk állítani továbbá a táv távolságriasztását, ez az RSSI, illetve a Channel Map-et ez pl. a Futaba protokollokkal kommunikáló távok esetében szükséges.
Ennyi félt bele a cikk első felébe, nemsokára jön a második rész, de az olvashatóságot nagyon rontaná, ha még hosszabbra hagynám. Stay tuned.
A sorozat következő része:





