Jumper T8SG távirányító teszt - Kínai svájci bicska
 A Jumper T8SG távirányító egy igazi mindenevő, számtalan protokollt ismer, vezérelhetjük vele versenygépeinket, mint ahogy a játék drónjainkat is, kezel tucatnyi csatornát, van egy csomó háromállású kapcsolója, kemény tokkal és nyakba akasztóval érkezik, Devo TX fut rajta, tehát halálra állítgathatjuk, és nem kerül 20.000 forintba, vagyis érdemes volt a terméket górcső alá venni.
A Jumper T8SG távirányító egy igazi mindenevő, számtalan protokollt ismer, vezérelhetjük vele versenygépeinket, mint ahogy a játék drónjainkat is, kezel tucatnyi csatornát, van egy csomó háromállású kapcsolója, kemény tokkal és nyakba akasztóval érkezik, Devo TX fut rajta, tehát halálra állítgathatjuk, és nem kerül 20.000 forintba, vagyis érdemes volt a terméket górcső alá venni.
Kicsomagolás
Érdekes a doboz dizájnja, ugyanis megtükrözték a két oldalt, így a szokásos grafikák helyett tulajdonképpen bárhogy forgatjuk a kartont, ugyanazt látjuk. Ez alapvetően trehány dolognak tűnik, de ebben az esetben pont az ellenkező hatást éri el, hiszen fontos információkat közölnek velünk. Ez pedig a kompatibilitási lista, hiszen ez a távirányító a használt irányítási protokollok közül majdnem mindent lefed.



A kinyitás után egy Taranis sajátjához hasonlító, keményfedeles doboz tárul elénk, ami ebben az ársávban eléggé szokatlan, például a QX7-emhez sem járt. Belül a távirányító és egy narancsszínű nyakbaakasztó pánt található, illetve a Deviation TX szoftver igen vaskos – ámbátor szerintem nem túl intuitív és eléggé száraz – leírása található.

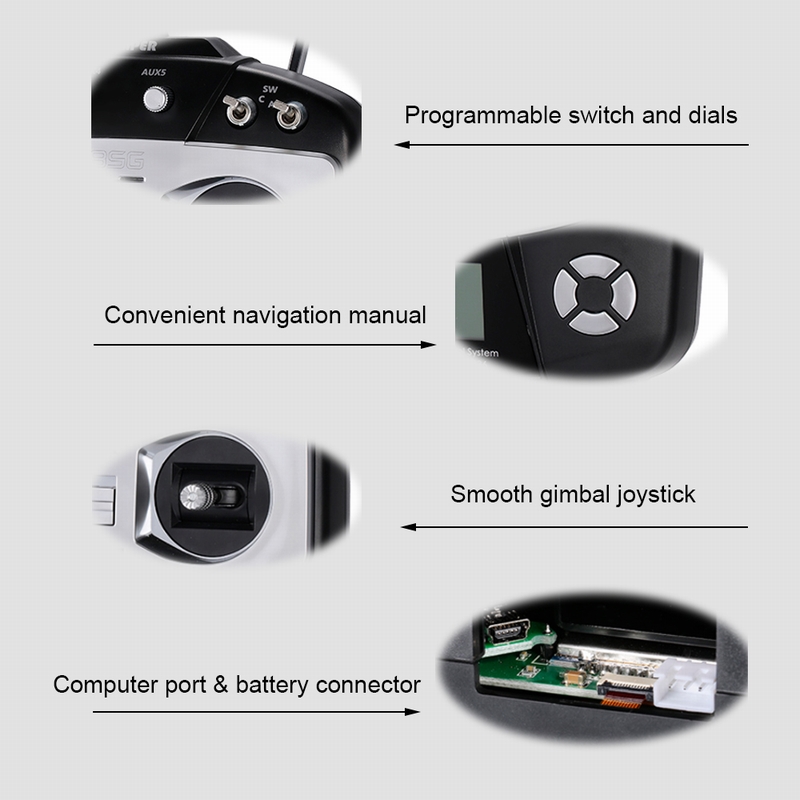
Ami elsőre feltűnik, hogy milyen pici távról van szó, ami a lányoknak és a kiskezű férfiaknak lehet nagy előny, de az én átlagos ujjaim is egyből mindenre rátaláltak. A kinézet eléggé Futaba ihletésű, de mint tudjuk, a jobbtól nem szégyen lopni. A T8SG anyaghasználata helyenként eléggé jó – leginkább ott, ahol alumíniumborítást találunk -, máshol kevésbé, ez jellemzően a műanyag felületekre és kapcsolási érzetre vonatkozik, de például így is veri a régebbi Flysky FS-i6 kontrollerek szintjét.

A felső sávon 4 db háromállású AUX kapcsoló és két potméter található, nekem az egyik potméter picit szorult, míg a botok eléggé rövidek, cserébe messzebb vannak a két fő irányítókartól, ami például a Taranis QX7 első generációjának hibája volt, nem véletlenül fordították kifele az újabb daraboknál. A kattanási érzet megfelelő, mint ahogy a gimbalok is jól járnak, igaz nem érezni a fokozatokat, a 0-100%-os állás végig átmenetes.

A négy trim gomb – amivel az irányok finomhangolását végezhetjük – a gáz és az irányváltó stickek alatt található, míg az alsó osztásban a menü vezérléséért felelős 2 fő és a 4 iránygombot pillanthatjuk meg. Az antenna mellett helyezkedik el a 3.5 mm-es jack trainer port, amivel szimulátorra köthetjük a Jumpert T8SG-t. Az antenna SMA konnektoros, vagyis nem kell heftölni ahhoz, hogy a bot antennát átcseréljük a kedvencünkre.

A másik nagyon nagy pozitívum, hogy akkumulátorról kell üzemeltetni a távirányítót. Mivel én szívből utálom az elemes megoldást, ennek kifejezetten örültem, a leharcolt rc autóim 2S 1200-as akkujai pedig tökéletesen belefértek, de persze bármilyen 18650-es Li-ionnal is mennie kell, csak faragni kell rá egy balancer portot, amin leadja a feszültséget. A befoglaló mérete 80x30x17 mm, ebbe kell valamit beleapplikálnunk. Itt lakik még a mini USB port is, ami a Deviation TX fejlesztése miatt fontos. Sajnos eléggé eldugott helyen van, nehéz hozzáférni.
Pár helyen olvastam, hogy lefikázták a Jumper T8SG-t, merthogy gyengébb a kivitelezés minősége a Devo 7e-nél, ami méretben és tudásban is hasonló tesztalanyunkhoz, miután beleszenvedtük a híres 4 az 1-ben modult. Én ezt nem vettem hibának, mert pont a 7e nem volt még a kezemben, bár szerintem a 7-es minősége is egy picit jobb, de aki otthon nem távokat gyűjtöget, annak ez semmit nem fog számítani.
Tesztüzem
Aki még soha nem használt Deviation TX-el felvértezett távot, az készüljön fel, hogy lesz vele némi szenvedés, ugyanis logikájában igencsak eltér mind a Flysky, mind az Frsky távoktól, pedig ez utóbbihoz is van pár száz órányi videós anyag a neten, szóval időigényes feladat a szoftverrel barátkozás.

Biztos most sok Devo használó felhúzza magát, de szerintem ez a kézikönyv, amit adnak hozzá, egy rakás sz*r, egyáltalán nem felhasználóbarát, nagyjából olyan, mintha én csináltam volna hobbiból, nem mondhatnám, hogy segít a mélyebb dolgok megértésében. A menüt meg én is végig tudom nyomkodni, szóval az annyira nem nagy plusz, hogy felsorolják, melyik menüben milyen további lehetőségek találhatóak.

Első dolog, hogy NE állítsuk át magyarra, mert utána a mindenféle összevisszaságra fordított menük tengerében úgy eltévedünk, mint a Minotaurus labirintusában. Egy két magyarítás kifejezetten logikátlan és volt olyan, hogy azért nem találtunk meg valamit Spyder barátommal, mert nem jöttünk rá, hogy az mit akar jelenteni. Angolul persze egyből meglett, szóval ragaszkodjunk az „english”-hez.

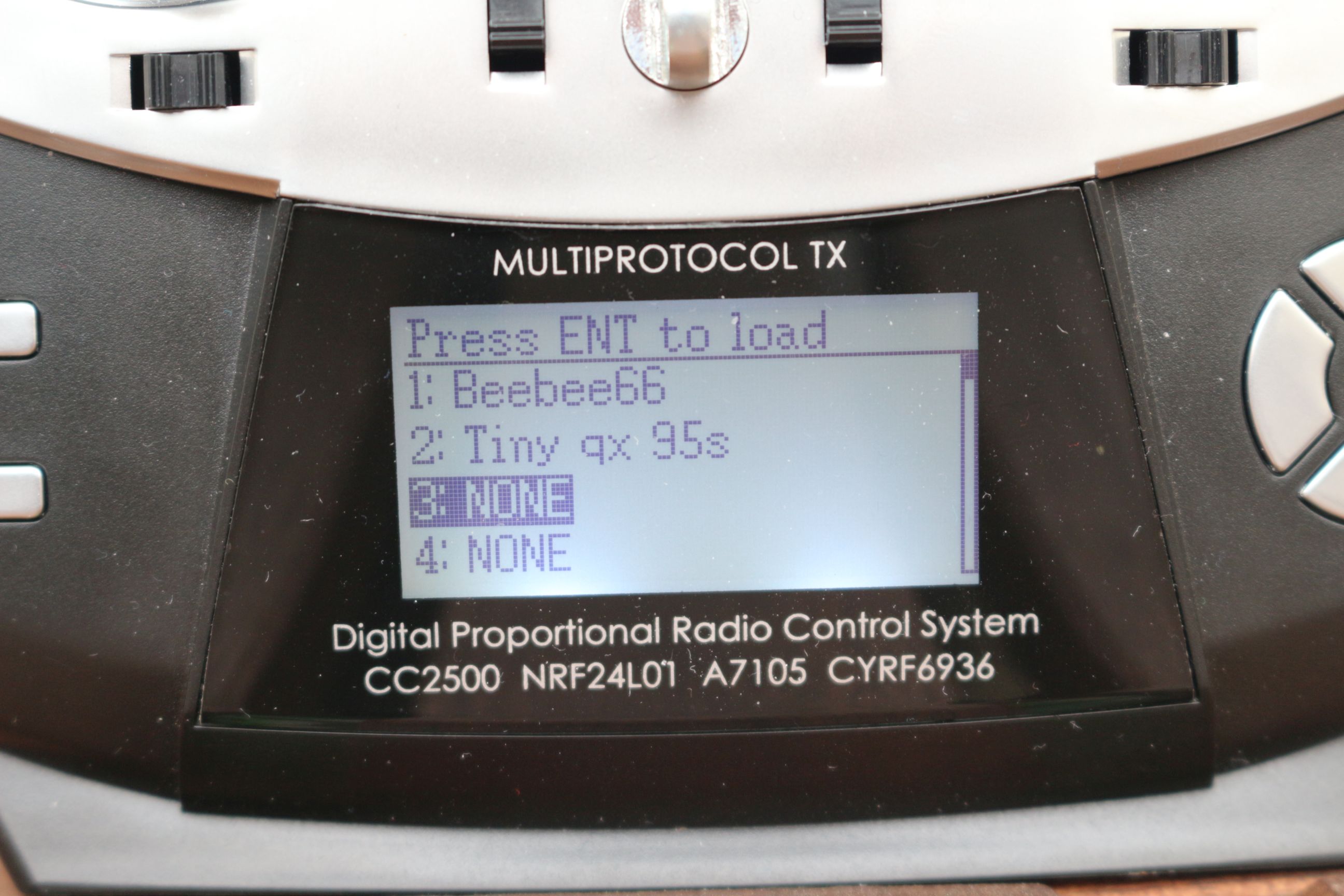
Mitől ilyen zseniális ez a táv? A multiprotokoll kezelése miatt, vagyis nemcsak egy, esetleg két gyártóspecifikus kommunikációs nyelvet ismer – mint pl. a Flysky AFHDS és AFHDS 2 -, hanem számtalant. Itt a párosítható gépek számát százas nagyságrendben kell érteni, legyen az egy gyári Hubsan, egy Frsky vevővel szerelt versenygép vagy éppen egy Walkera, mindet fogja kezelni.

Ezek azok az információk, amelyeket nagyon lelkesen a dobozon is feltüntettek, ez a JP-4MP 4 az 1-ben chipnek köszönhető. A varázsszavak az alábbiak: CC2500, NRF24L01, A7105 és a CYRF6936. Ezek azok a modulok, ami miatt a multivezérlés megvalósul. A lista nagyon hosszú, akit bővebben érdekel, az erre a linkre nyomjon.
A protokollkezelés sok esetben abban nyilvánul meg, hogy megkeressük a megfelelő nevű modellt a menüben, bind és már megy is. Azért itt is kell egy kicsit nézelődni a fenti táblázatban, mi egy Eachine E011-gyel próbáltuk, ami az NRF24L01 chipet használja és Bayang protokollos, mint ahogy szinte az összes Eachine modell. A poén az, semmit nem kellett állítgatni, egyből ment a kis mini, ráadásul a távirányító végállásaiban sokkal agresszívabban lehet dönteni a gépet, először azt hittem acroban repül, olyan nagy volt a szög.

A távirányító 30 modellmemóriával rendelkezik, ennyi különböző repülő alkalmatosságot tudunk eltárolni, ami szerintem bőségesen elegendő, nekem a Taranison sem volt még soha több 12-nél. A műszaki geekeknek öröm lesz, hogy az ARM mag 256 KB memóriát kapott, vagyis a Deviation TX teljes mértékben belefér, így az összes funkciót ki lehet használni. Ugyanez a Devo 7e esetében csak 128 KB volt, és bár személyes tapasztalatom nincs, emiatt nem minden buildet lehetett implementálni.
Állítóag a modellszámot meg lehet duplázni, ha belenyúlunk a konfigurációs fájlokba és megkeressük a modellxx.ini nevű állományt. Minden állomány az adott modellmemória pozíció nevére van elnevezve, vagyis a modell29.ini a 29. hely, így elméletileg modell31.ini-vel létrehozható a 31. is, és így tovább 60-ig. Nem próbáltam, de aki szeret ilyenekben túrni, az ne fogja vissza magát.

Ráadásul kapott a készülék egy vibro motort is, ami „force feedback-szerűen” visszajelez különböző állapotokat. A mini LCD panelen – aminél azért már láttunk szebbet és nagyobb felbontásút – a modell nevét, az adóteljesítményt, az akkumulátor feszültségét, a gázállást, és a timer aktuális idejét jelzi ki. Sajnos még maximum fényerőn sem elég világos ahhoz, hogy vakító napsütésben használni lehessen, de azért ha egy picit felhős az ég, akkor már elég jól látható minden.
A hatótáv remek, ráadásul az adóteljesítményt fel lehet nyomni 150 mW-ig, ami itthon tudtommal már a tilos kategóriába esik, 100 mW talán a maximum, de a lehetőség adott, ha esetleg olyan országban járunk, ahol ez megengedett.

Beszéljünk egy picit a menüről, mert ebben azért el lehet veszni. Az egyszerűbbtől haladok a bonyolultabb felé, mert szerintem így könnyebben megérthető a működés. Az „ent” gombbal lépünk be a menübe az „ext”-tel pedig ki, míg a jobb oldali nyilakkal lapozgathatunk a lehetőségek között. A főmenüben 4 opciót láthatunk, az utolsó kettő közül az első bekapcsolja az USB portot, az utolsó pedig a Deviation TX szoftver verziószámát írja ki. A maradék két menü közül a második a kontroller beállításait, míg az első a repülő eszközeinkhez kapcsolódó konfigurációs lehetőségeket tartalmazza, kezdjük a távhoz tartozókkal.
 A távirányító menüben újabb 4 lehetőség tárul elénk, amiből a „range test” a hatótávolság tesztjére lenne jó, de mivel itt négyzetgyököket kell vonogatni, ezért ezt a kutya nem fogja használni, helyette mindenki kimegy egy mezőre és megnézi, hogy az adott modell meddig tud repülni és kész. Legyen elég annyi, hogy a Jumper a gyári távirányítókhoz képest meglehetősen erős, lásd például ezt a videót, ahol a gép hatótávja a háromszorosára nőtt.
A távirányító menüben újabb 4 lehetőség tárul elénk, amiből a „range test” a hatótávolság tesztjére lenne jó, de mivel itt négyzetgyököket kell vonogatni, ezért ezt a kutya nem fogja használni, helyette mindenki kimegy egy mezőre és megnézi, hogy az adott modell meddig tud repülni és kész. Legyen elég annyi, hogy a Jumper a gyári távirányítókhoz képest meglehetősen erős, lásd például ezt a videót, ahol a gép hatótávja a háromszorosára nőtt.
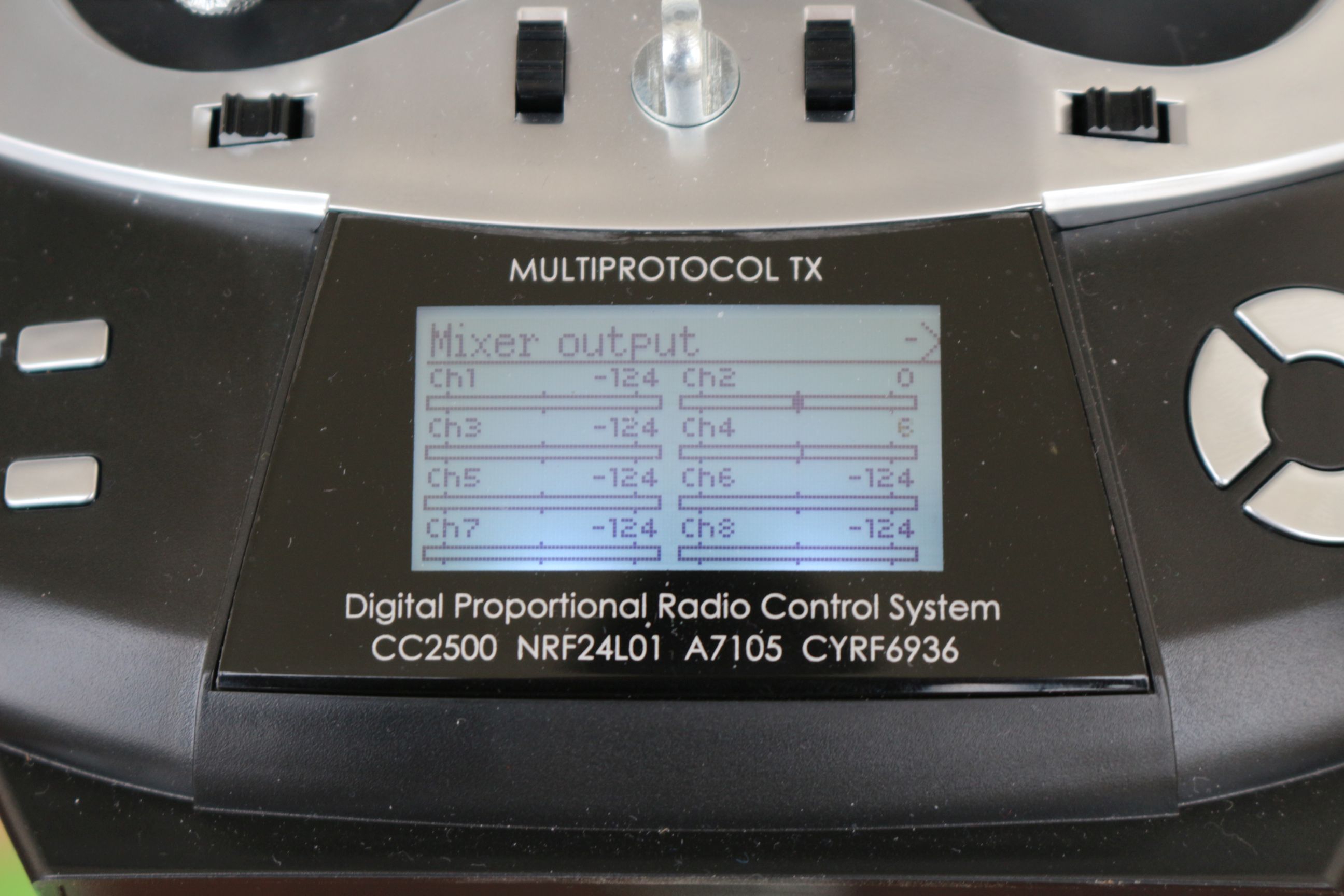
A telemetria monitor értelemszerűen akkor működik, ha van bekötve telemetriás vevőnk, nekem ilyenem nem volt a teszt ideje alatt, de a kézikönyv részletesen taglalja a hogyant. A channel monitor egy fontos rész, hiszen itt tudjuk ellenőrizni, hogy az AUX csatornákat jól állítottuk-e be vagy sem, ide érdemes visszatérni az első felszállás előtt, és szépen mindent végigkapcsolgatni. A „transmitter config” lapon elég sokat el lehet időzni, erről bővebben szólnék.

Az első sor a „language”, vagyis a nyelv ezt NE változtassuk meg magyarra, csak kavart okozunk vele. A „stick mode” a működési módválasztó, vagyis hogy a csatornák hova kerüljenek, hagyjuk mode 2-n. A „calibrate”-ben a karokat programozhatjuk fel, de semmiféle visszajelzést nem kapunk a végén, ami elég fura. Az „audio settings” alatt a hanggal kapcsolatos dolgokat lehet állítgatni, itt a lényeges a „batt alarm”, vagyis az alacsony feszültség riasztás, ezt én 7 V-on hagytam, de szerintem 6.5 V-ig nyugodtan le lehet vinni. A többi menüpont nem különösebben lényeges, az időzítőre és az LCD beállításaira van kihatással.

Lépjünk át a modell menübe, ahol tulajdonképpen a lényegi dolgok vannak, ugyanis itt tudunk mindent beállítani, ami a különböző repülő masináinkhoz tartozik. 8 almenüt pillanthatunk meg, ebből az utolsó három tulajdonképpen lényegtelen, csatornákat monitorozhatunk, átrendezhetjük a képernyőt és hasonlók. A 4-est, a telemetriát már említettem, de ezt nem próbáltam, ahogyan a 3-as timert sem használtam, de ez utóbbiról két mondat erejéig beszélnék. Itt különböző módon viselkedő órákat állíthatunk be külső kapcsolókra, így nyer értelmet ez a rengeteg csatorna. Például az AUX 5 elhúzására elindul 5 percről a visszaszámlálás, amikor is le kell szállnunk, ekkor a Jumper T8SG rezgéssel és sípolással jelez. Szerintem amióta van OSD és csipogó, ez fölösleges, bár kétségtelenül jópofa.
A „model setup” és a „mixer” menüből mindkettő fontos, kezdjük az elsővel. Ez az a hely, ahol fel fogjuk venni a modelleinket, beállítjuk a nevüket, párosítjuk a távhoz, adóteljesítményt deklarálunk stb. Itt egy csomó paraméter fix, ugyanis az adott protokoll kiválasztásával a szabvány adta lehetőségeket is beállítja a távirányító. Szerettem volna kipróbálni valami RTF modellel, de ilyenem nem volt, ezért egy Frsky gépemet párosítottam a kontrollerhez. Ez abból a szempontból is szerencsés, hogy ezek után a Betaflightban tudjuk ellenőrizni, minden úgy működik-e, ahogy annak kell.
Nem fog, ezért két dolgot is be kell állítanunk:
- a mixer menüben, a bal oszlopban a csatorna alatt a +- scale értékeket, ezek határozzák meg, hogy a csatornák mekkora logikai utat járnak be. Ezt kell 1000-2000-re állítanunk Betaflightban. Egyes csatornákat meg kell majd fordítanunk, így vele fordul a scale is, tehát a mínuszból plusz lesz, és fordítva.
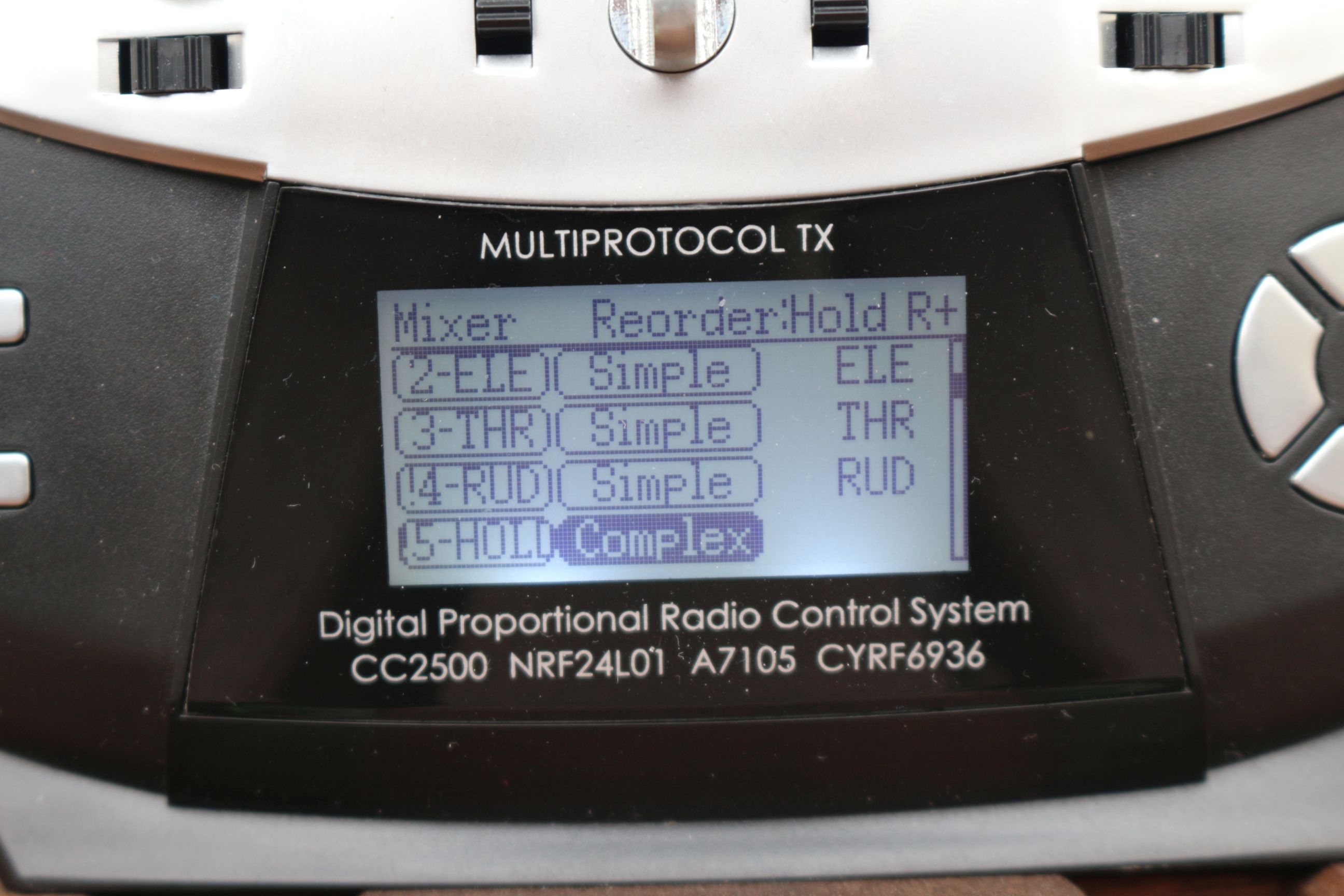
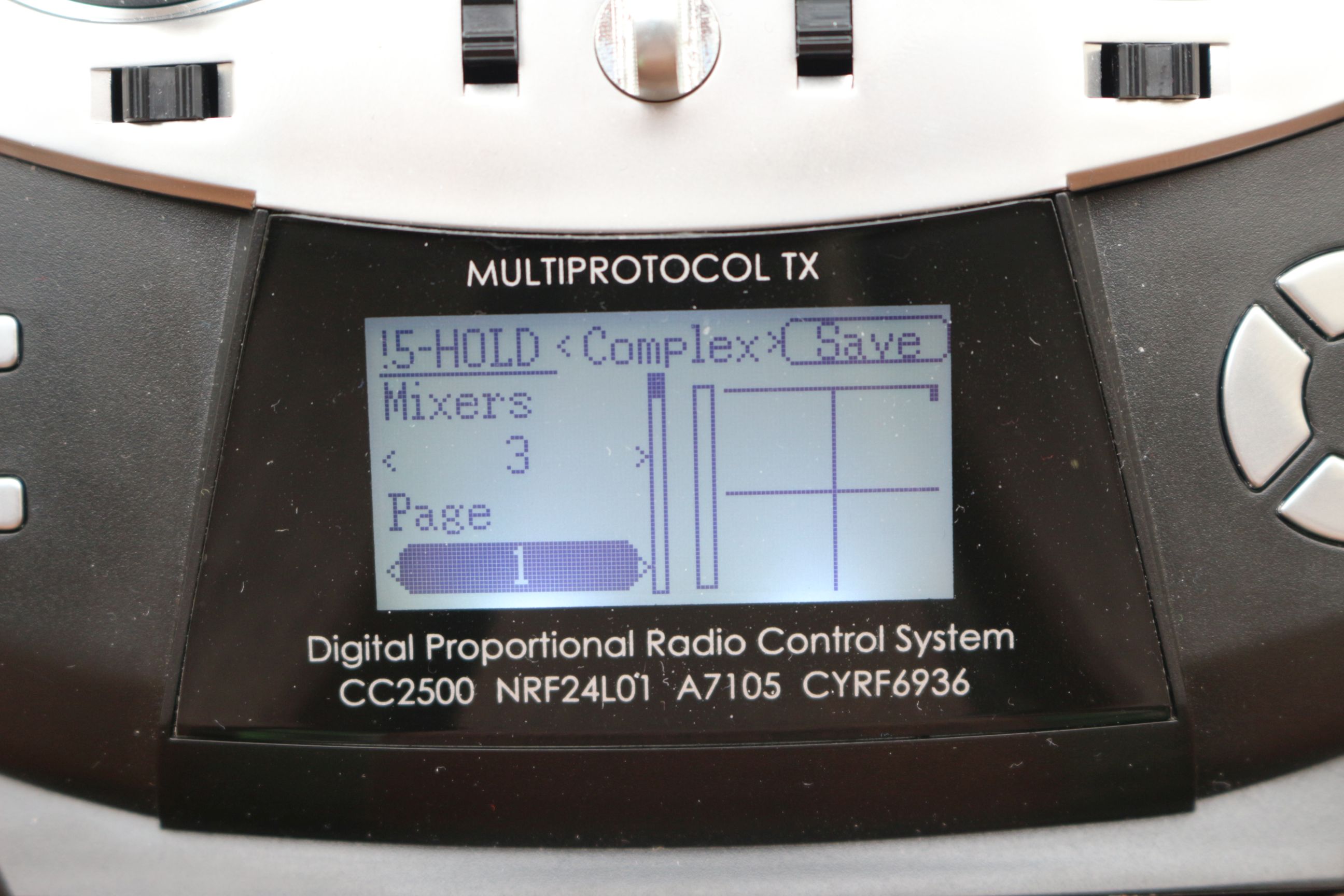
- a mixer menüben, a jobb oszlopban a csatorna alatt az ötös-nyolcas csatornák lesznek az AUX-ok, ezeket szintén be kell állítani. A mód complex legyen, a mixers 3, switch a kiválasztott kapcsoló egy adott állása, forrás none, curve fixed, scale 125. A page fülön tudunk váltogatni, a scale értékével pedig tologatni a pozíciót.
- a jobbra gomb hosszú nyomásával másolhatjuk a beállításokat, így nem kell minden AUX csatornára külön beállítanunk ugyanazt.
Akit bővebben érdekelnek a Betaflight és a Deviation TX beállítások, az nézze meg a videót, amit készítettem róla.
Összegzés
A Jumper T8SG az a termék, amire mindenkinek szüksége van, aki multiprotokollos környezetben akar repülni. Amikor én Flysky-ről Frsky-ra váltottam, csak a lecserélt vevők árából vehettem volna egy ilyen távirányítót, máris a pénzemnél lennék. Nagyon sok okos dolgot tud, szinte minden gépet kezel, sok háromállású kapcsolója van, akkumulátorról üzemeltethető, az antennája cserélhető SMA porton keresztül, és azért a Deviaton TX elég sok mindent tud, ami a helikoptereseknek biztosan tetszeni fog.
Sajnos a negatívumok mellett sem szabad elmennünk, helyenként a kapcsolók érzetre elég gagyin működnek, és aki nem ismeri a szoftvert, az bizony meg fog vele szenvedni, mert nem az Frsky vagy a Flysky logikát követi, ráadásul ennek kibogozásában a kézikönyv sem sokat segít. 19.250 forintot viszont biztosan megér.
| Előnyök | Hátrányok |
|
+ olcsó |
- a Deviation TX-et szikni kell |
A távirányítót itt vásárolhatjátok meg (az árak az árfolyam ingadozásának és az akciók függvényében változhatnak). EU Expresszel szállítással nem kell vámot és ÁFA-t fizetni:
- Jumper T8SG, Gearbest : 77 USD, 19.250 Ft
Ha tetszett a cikk, kérlek tisztelj meg azzal, hogy nyomsz a cikkre egy lájkot Facebookon, így látni fogom, hogy munkám nem hiábavaló. Annak is örülök, ha megosztod, így még több emberhez jutnak el az információk. Előre is köszönöm.




