JJRC X3 Pro HAX drón teszt – Mélyrepülés

A JJRC X3 Pro a legújabb modell azon a hármas palettán, amit az X1 és az X2 modellek vezettek fel. A koncepció azonban gyökeresen megváltozott, a zúzós-sportos irányultságot a GPS stabilizált, mindent tudó, elektronikus funkciókkal és szoftveres vezérléssel felvértezett „wannabe kamera platform” vonal váltotta le. Nézzük, hogy mit ad nekünk a cég, durván 39.000 forintért.
JJRC X3 Pro kicsomagolása
A JJRC modelleket én személy szerint nem szeretem. Nem mondom, egy jó gépük sincs, de ezeket jellemzően JJRC Pro-nak hívják, és átbrandelt Emax gépekről van szó, amelyek természetüknél fogva egy nagyságrenddel többet tudnak, mint az eredeti JJRC modellek. Mivel a széria másik két tagjával, a JJRC X1-gyel és X2-vel is repültem, sőt teszteltem is őket, érdemes átnézni, honnan indult és hová tart a fejlődési görbéjük.
A csomagolásnak nem szoktam nagy jelentőséget tulajdonítani, és ez különösen igaz a dizájnra, a lényeg az, hogy védje meg a benne elrejtett tartalmat. Külsőre nem rossz, dinamikus benyomást kelt az összhatás, kicsit hasonló a Hubsan H501 vonalhoz, bizonyos formai elemek – például a vázkialakítás, a karok végén elhelyezkedő LED lámpák – szinte biztosan onnan származnak, de jobbtól nem szégyen tanulni, különben ma nem lenne például Japán vagy Dél-koreai autógyártás.




Tartalmi szempontból véve nagy extrára nem kell számítanunk, drón, távirányító, 8 db propeller, okos akkumulátor, szerszámkészlet, 1080p kamera, és egy csomó papír, amely többek között magában foglalja a leírást, az applikáció letöltésének módját, meg a szokásos „disclaimer jellegű” kinyilatkoztatásokat, aminek a lényege, hogy ha a gyereked lenyeli az akkumulátort, akkor nem a cég a hibás.

Pörgessük át a kézikönyvet, mert a GPS stabilizált drónoknál jó tudni, melyik gomb mit is csinál a távirányítón, illetve hogy milyen karszekvenciákkal operálhatunk, plusz valahogy a kalibrációt – a híres "compass dance”-t – is végre kell majd hajtanunk. A JJRC X3 Pro méretén meglepődtem, azt hittem a Hubsanhoz hasonló lesz, de annál jó 5 centivel kisebb, amit itt pozitívumnak vettem, mivel könnyebb lesz hordozni.

Minőségre kicsit az MJX és a Hubsan alá lőtték be, igaz árban is, ez még bőven az elviselhető kategória. A kamera különálló, sínrendszeren csatlakozó darab, és két antenna is kiáll az oldalából, vagyis a szokásos 5 Ghz-es frekvencián túl valamilyen másik csatornán is képes kommunikálni, de erről majd később. A modularitást én szeretem, feltételezvén azt, hogy a későbbiekben egy jobb minőségű darabra lehet majd cserélni a jelenlegit.




Az akkumulátor „proprietary”, vagyis egyedi, okosnak mondott, bár ennek sok köze nincs a DJI-féle, valóban normális elektronikával rendelkező darabokhoz, cserébe viszont USB-ről tölthető. Ez szerintem inkább előny, mint hátrány, lévén semmilyen speciális töltőegységre nincs szükség, az egy más kérdés, hogy az elektronika balanszol-e, illetve ezzel durván meg tud nyúlni a töltésidő, akár 3-4 órára is, az USB-s eszköz teljesítményétől függően.
JJRC X3 Pro távirányítója
A kontroller külseje kísértetiesen hasonlít a Walkera Devo 7e univerzális távra, méretben is nagyon hasonlóak. Sajnos tudásra és anyaghasználatra már kevésbé, és a JJRC elkövette azt az „emberiség ellenes bűntettet”, hogy nem feliratozta a gombokat, szóval lehet nyomni a „képkeresőt”, hogy vajon melyik milyen funkciót aktivál.

A távirányító 4 db 2A elemet hordoz a hátuljában, sajnos akkumulátort nem tud fogadni. Szemből nézve, balról lefele indulva az alábbi funkciókat tudjuk aktiválni. Középen a „bekapcsoló kapcsoló” , alatta a trim gomb, ami egy vakkapcsoló, gondolom későbbi felhasználásra fenntartva. A képernyő körüli gombok felülről lefele az alábbiakat kapcsolják: fényképezés, videó, sebességválasztó. Ezek ellentétpárja a jobb oldalon látható, szintén felülről lefele: felszállás, leszállás – mindkettő hosszú nyomásra, headless mód.
Mit jelent az Altitude, GPS, RTH mód?
A drónokon általában több különböző repülési módot lehet kapcsolni, ebből a kameraplatformok esetében a legáltalánosabbnak nevezhető a GPS stabilizált mód. Ilyenkor a gép a műholdak helymeghatározására hagyatkozik, de a pozíciótartásban barometrikus, ultrahangos vagy egyéb rendszerek is segíthetik.
Az Altitude hold - vagy más néven magasságtartás - mód az, amikor kizárólag a földtől mért magasságát tartja a drón, de a pozícióját nem. Ez több szempontból is érdekes, egyrészt ilyenkor a szél oldalirányban el tudja fújni, másrészt még így is képes követni a föld felszínét, és tartani a távolságot.
Az RTH - vagyis Return to Home - az automatikus visszatérés rövidítése, ilyenkor a felszállási pontra vagy egy előre meghatározott helyre tér vissza a drón. Ezt az állapotot több dolog is kiválthatja, egyrészt mi manuálisan is megtehetjük, másrészt a kapcsolat megszakadása, akkumulátor merülése és még egyéb események is aktiválhatják.
A jobb oldali trim gomb kapcsolja az „electric fence” vagyis a korlát funkciót, ilyenkor a gép nem tudja elhagyni a 100 méter magas és 300 méter távolságú területet. A jobb vállon a módválasztót láthatjuk piktogramokkal jelölve: Altitude mód – tartja a magasságát, de GPS nem működik -, GPS mód, illetve automatikus visszatérés a felszálló helyre. Az első kettőt valamiért beltéri és kültéri módnak hívja a gyártó, de ez ne tévesszen meg senkit.
A kis kijelzőn láthatjuk a telemetria adatokat, amiért nagy piros pont jár a gyártónak. Ez magában foglalja a távolság, magasság, sebesség adatokat, a drón működési módjait, akkumulátor merülését, szóval nagyjából mindent, ami fontos lehet. A gond csak az, hogy a mákszemnyi, nulla fényerővel rendelkező LCD panelen meglehetősen nehéz bármit is leolvasni, szóval mindenki álljon be egy árnyékos fa alá.



A hatótáv meglehetősen nagy, főleg, hogy már a geofence is elengedi 300 méterre – hívhatjuk ezt kezdő módnak is – de egyes leírások szerint tud 500 métert is, az egy másik kérdés, hogy a WiFi átvitelből fakadó késleltetés mennyire teszi tönkre az FPV képet.
JJRC X3 Pro applikációja
Egy külön lapot kapunk ahhoz, hogy eltaláljunk a megfelelő oldalra, ahonnan ez leszedhető. Nekem egyből működött, de olvastam olyat, hogy ha egy előző verzió már fent volt a telefonunkon, akkor nem jól frissül le.
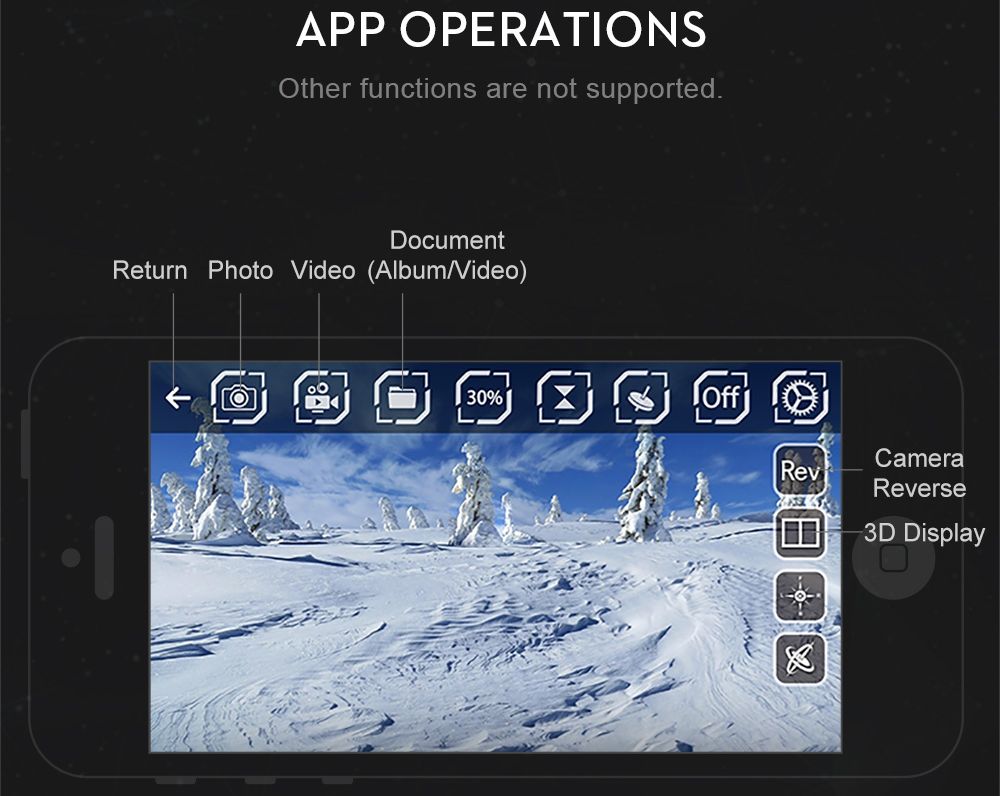
Kinézetre eléggé „puruttya”, ilyen dizájnt a 10-15.000 forintos Visuo drónnál láttam utoljára, ahol ez teljesen rendben is van, csakhogy ez egy 40.000 forintos modell. A másik gond az, hogy láthatóan egy előző modell applikációját hozták össze a drónnal, vagyis nem specifikusan a JJRC X3 Pro-hoz készült, emiatt egy csomó funkció nem működik. Annyi igényesség viszont nem volt a cégben, hogy a fölösleges menüpontokat kivegye, vagyis egy csomó minden nem működik.
Ami viszont igen, az a távirányítóról is aktiválható – egyet kivéve -, ilyen a fotó, a videó, a 3D megjelenítés és a legfontosabb: a kép megfordítása lehetőség. Erre szükségünk is lesz, ugyanis valamilyen rejtélyes okból kifolyólag alapból a kamera képe fejjel lefele jelenik meg. Mivel a képátvitel 5 Ghz-es, ezért szükségünk lesz egy dual bandes telefonra, ha látni akarjuk a képet. Összességében a mobil eszközünk fő funkciója az FPV kép megjelenítése lesz.
JJRC X3 Pro tesztje
Mivel ez egy GPS stabilizált gép, a bekapcsolás utáni első dolgunk az legyen, hogy kalibráljuk a drónt. Mivel minden elektronikus funkció a helyes helymeghatározásra alapul, a JJRC X3 Pro-nak tudnia kell, hogy merre áll és hogy mi a pontos pozíciója, különben nem fognak megfelelően működni. Természetesen gond esetén Altitude Hold módba kapcsolhatunk, és átállhatunk kézi vezérlésre is.

A kalibrációt a karok bal alsó, illetve a jobb felső sarokba húzásával kezdhetjük meg. Erről semmilyen állapotjelzés nem érkezik vissza a távirányítóra vagy az applikációba, pedig ezek kiváló felületek lennének a megjelenítésre. Elvileg a LED-ek színe alapján kellene megállapítanunk az aktuális állapotot, de ezek felülről egyáltalán nem látszanak, az pedig elég furcsa lenne, ha 10 másodpercenként emelgetnénk, hogy akkor most éppen mi és hol világít.

Az alsó LED-ek már jobbak, a vertikális és a horizontális kalibrálást kék és zöld statikus világítással jelzi vissza. Ha ezek lezajlottak, akkor kezdhetjük meg a repülést a JJRC X3 Pro-val.

Nézzük, pontosan milyen automatikus funkciókat aktiválhatunk:
- automatikus fel- és leszállás
- RTH, vagyis automatikus hazatérés
- alacsony feszültségre és jelszakadásra hazarepülés
- GPS/Altitude hold mód
- igazi headless mód
- geofence, vagyis olyan terület, amiből a drón nem repülhet ki
Mi az a toilet bowl effect?
A gépek normális esetben stabilan tartják a pozíciójukat, kivéve ha valamilyen okból kifolyólag nem képes stabilizálni, például beállítási hiba, magas K-index, egyéb zavarás, árnyékolás és így tovább.
Ilyenkor a gép folyamatosan kileng, egyre erősödő ütemben, ezt a mozgást szokták toilet bowlnak hívni, hiszen egy ellipszis pályát ír le a gép. A lengés vége általában egy csúnya esés, vagyis igyekezzünk ebből a helyzetből kihozni a drónt, manuális irányítással.
Az automatikus fel- és leszállás után másfél méterre emelkedik fel az X3 Pro, és itt kellene tartania a pozícióját, de nem teszi, helyette több méteres köröket ír le, amit szakszóval úgy hívunk: toilet bowl effect. Ez egy meglehetősen veszélyes probléma, egyrészt azért, mert láthatóan nem stabilizál megfelelően, másrészt, mert a rezgések és remegések mind megjelennek a videófelvételen. A másik gond az, hogy a gép gondol egyet, majd random irányba elindul, és kénytelenek vagyunk az irányító karokkal beavatkozni, hogy megszakítsuk.
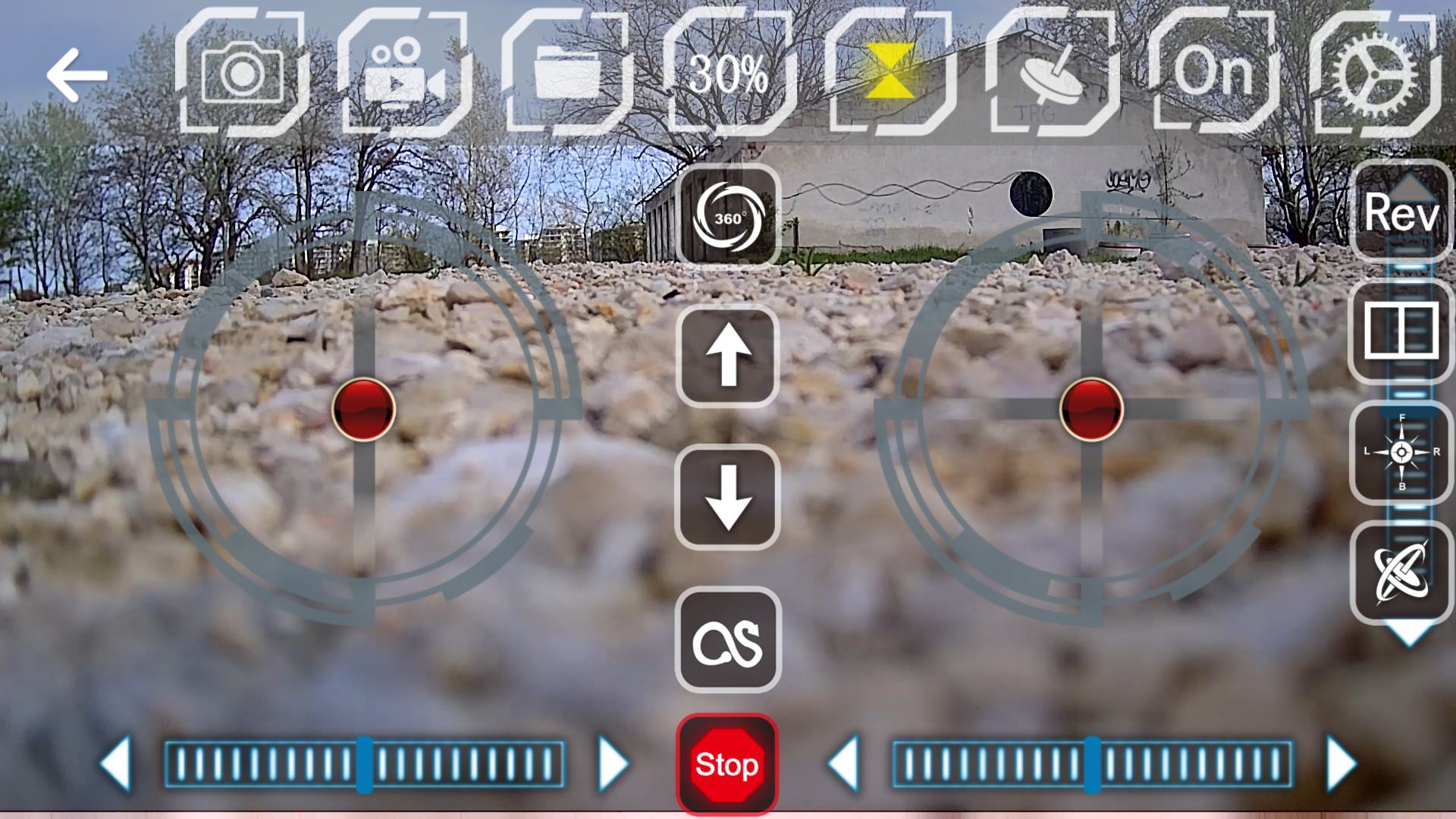
A másik hatalmas hiba a kamera szekcióban keresendő. Először is, a képminőség botrányos, az egy dolog, hogy hitvány a felbontás, de hogy még a fényérzékenysége és a kontraszt aránya is pocsék, az kölcsönöz a dolognak egy fajta kilencvenes évek feelinget. Ráadásul a várt 1080p 30 FPS helyett csak 20 képkocka áll rendelkezésre, az elektronikus stabilizálást hírből sem ismeri, 3 Mb/másodperc fölé nem megy a bitráta, nálam ezek az adatok nem ütik meg a mércét.
A helyzetet tovább súlyosbítja, hogy az összes remegés megjelenik a képeken, amelyek alapból rossz minőségűek, gyakorlatilag nem lehet velük értelmes videó anyagokat készíteni. Erre tökéletesen alkalmatlan a gép, viszont akkor pontosan mire akarnánk használni? A repülési idő kiváló, 13-15 percet is el lehet karistolni a drónnal, ami viszont használható funkciók hiányában meglehetősen céltalan. A 2000 milliamperórás, 2 cellás akkumulátort 2-4 óra alatt tudtam feltölteni, ami mondjuk egy DJI Sparkhoz képest – ami legalább ennyit tud repülni – meglehetősen hosszú.z elektronikus funkciók működése több, mint kétséges. Van mikor teszik a dolgukat, van mikor nem. Egy csomó esetben csak az újraindítás segít, és ez nagyjából mindenre igaz, kezdve az RTH-tól az automatikus fel- és leszálláson át magasságtartásig. Az sem segít rajta, hogy ha a módválasztót kapcsolgatjuk, ugyanúgy sodródik, függetlenül attól, hogy Altitude vagy GPS hold módban van.

Az utolsó kenetet azonban a már említett második WiFi sáv jelenti, amit európai eszközökkel nem lehet befogni, lévén digitális 5.8 Ghz-ről van szó. Elméletileg a 149-153-as sávon ad, csak éppen egyetlen okostelefonnal sem tudtam befogni. Direkt megnéztem analóg FPV szemüveggel is, hátha én tévedek, de a 48 csatorna egyikén sem adott képet. Gondolom az amerikai piacra szánták ezt a megoldást, de azért lehetett volna annyi eszük, hogy ezt lekezelik az európai piacon is.
Összegzés
Mondanom sem kell, hogy nem fog a gép az ajánlott kategóriába kerülni a pocsék pozíciótartás, applikáció, kamera hármas miatt. Sokkal jobb választás gyakorlatilag mindegyik konkurens. Már írtam cikket mind az MJX gépekről, mind a Hubsanokról, de ezek közül is kiemelkedik a Hubsan H501 Air modell, ami alig drágább, mint a JJRC X3 Pro, mégis sokkal jobb a kamerája, az applikációja, ráadásul még stabilabb is. Persze a Hubsan H501 S is jó választás, titkos tipp pedig a Hubsan H501M, amely az előző modellek fékezett habzású variánsa, de olcsóbban.
Aki pedig ki tud fogni egy MJX Bugs 2W-t, olyan 160-180 dollár körül, az nyugodtan megveheti, mert bár szoftveres oldalon kevesebbet tud, mert minőségben, stabilitásban és kamerában is simán lenyomja a JJRC X3 Pro-t.
| Előnyök | Hátrányok |
|
+ GPS stabilizált |
- rossz pozíciótartás, toilet bowl effekt |
A drónt itt vásárolhatjátok meg (az árak az árfolyam ingadozásának és az akciók függvényében változhatnak). EU Expresszel szállítással nem kell vámot és ÁFA-t fizetni:
- JJRC X3 Pro, Gearbest, CN : 153 USD, 39.000 Ft
- MJX Bugs 2W, Gearbest, CN: 190 USD 48.000 Ft
- Hubsan H501S, Gearbest, EU raktár : 213 USD 54.000 Ft
Ha tetszett a cikk, kérlek tisztelj meg azzal, hogy nyomsz a cikkre egy lájkot Facebookon, így látni fogom, hogy munkám nem hiábavaló. Annak is örülök, ha megosztod, így még több emberhez jutnak el az információk. Előre is köszönöm.





