Minden amit az ESC-kről tudni kell
Ebben a posztban az ESC-k ről szó. Az ESC egy rövidítés (Electronic Speed Controller), jelentése elektromos sebességszabályzó elektronika (bár az elektromos fordulatszabályozás jobban illene rá).
Két nagy csoportba lehet sorolni őket, a Brushed (kefés motorokhoz használatos), illetve Brushless (kefe nélküli motorokhoz használatos) vezérlők. A kefés motorokhoz gyártottak sokkal egyszerűbbek, akár egy tranzisztor is elég a vezérléshez, olcsó multikoptereknél szeretik alkalmazni, mert akkor egy kis nyákon (nyomtatott áramkör) is elfér az egész.
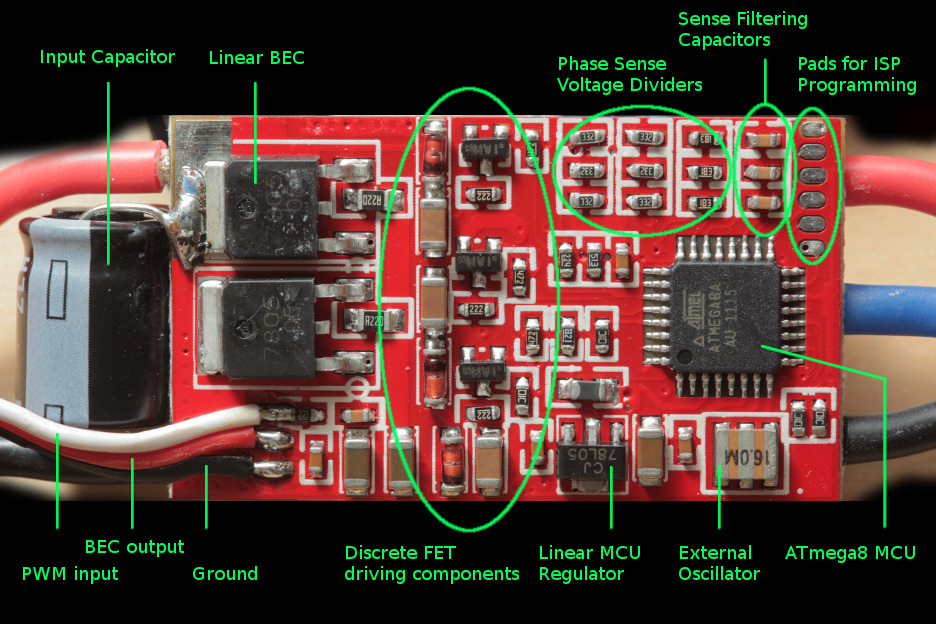
A BLDC, vagyis kefe nélküli motorokhoz sokkal bonyolultabb és drágább az ESC-k legyártása, mivel itt 3 fázist kell kell előállítani. Egy fázishoz minimum két FET-Tranzisztor kell, vagyis ez 2*3=6 tranzisztort jelent még a legegyszerűbb vezérlésben is.
Az ESC-k paraméterei
Feszültség: Ezt az akkumulátorok celláira adják meg, 2S-6S cellaszámig léteznek. Átlagban 3 cellásak a legelterjedettebbek.
Áram: Mekkora a maximális áramerősség, amit az ESC még tartósan elvisel. Ezt jellemzően az akkumulátorokkal és a motorokkal párhuzamosan kell meghatároznunk. Az előbbi fogja leadni a megfelelő árammennyiséget, míg az utóbbi fogja felvenni azt, miközben átfolyik a fordulatszám vezérlőn.
Firmware: egy olyan programcsomag, amely valamilyen nem illékony memória modulon kerül tárolásra az ESC-n és egyben vezérli is azt. Legismertebb típusok a SimonK vagy a BLheli, de léteznek a gyártóknak saját firmwarejei is.
UBEC (universal battery eliminator circuit): Ez egy tápegység, ami az akkumulátor feszültségét lecsökkenti 5 voltra, a távirányító és a vezérlő számára. Ha ez nem történne meg, akkor az elektronika kiégne, mert túl nagy feszültséggel folyna át rajta az áram. Az ESC-k többségében megtalálható ez az elektronikai áramkör. Részletesebben itt.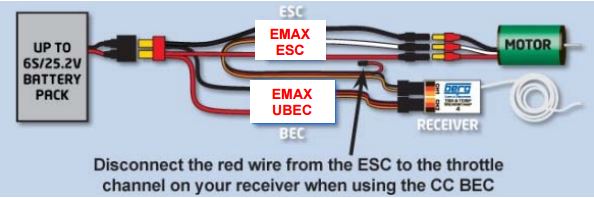
Opto: Az ESC vezérlő bemenete egy opto csatolóval galvanikusan le van választva.
PWM: impulzusszélesség moduláció (pulse with modulation), egy szabályozási módszer az elektronikában, lényege, hogy nem a feszültség mértékét (nagyságát), hanem annak idejét változtatjuk, ki és bekapcsolva az áramot. Ez azt jelenti, hogy a feszültség mértékét nem annak nagysága, hanem a ki és bekapcsolt állapotok közötti arány fogja meghatározni, pl. 1:1-hez arány esetén a feszültség feleződni fog, mert a kikapcsolt és bekapcsolt állapotok azonos arányban ismétlődnek. Így lesz 12 voltból 6 volt, ha ez az arány 1:2 lenne, akkor 4 volt lenne a feszültség, míg 1:3 esetén 3 (az arányszám összegével elosztjuk a feszültséget, majd megszorozzuk a bekapcsolt állapotok számával). Forrás: Prohardver tudástár.
OneShot125: Az ESC-k protokollokon keresztül kommunikálnak. Protokollnak hívjuk azt a szabvány "nyelvet", amelyen az elektronikus, a hálózati és egyéb más eszközök előre definiált szabályok és paraméterek mentén egymással kommunikálnak. Úgy kell ezt elképzelni, mint a középkori "etikettet", amely leírta a társasági érintkezés szabályait (pl. tiszteletadás, bevonulási sorrend stb.), ehhez hasonlóan kommunikálnak az elektronikai elemek is. A OneShot125 az előzőekhez képest egy gyorsabb protokoll, amely megvalósítja a kommunikációt az ESC és az FC (flight controller v. flight controller board=repülési irányító) között. Ehhez azonban meg kell értenünk, hogyan történik az FC vezérlőjel átadása az ESC felé.
Az FC egy ún. fő vezérlő hurokkal kalkulálja ki az adatszenzorok alapján az új vezérlési értékeket, ezt küldi ki a ESC nek, majd onnan átkerül az motor-ba. De az a ciklus, amely alatt az FC kiadja a fő vezérlő ciklust, nem mindig azonos, ezért néha késik a motorhoz képest, így az a régi értéket újra továbbküldi ("beírja" még egyszer a régi FC vezérlő értékeket). Ez azt jelenti, hogy kicsit késni kezd a vezérlés és így a motor fordulatszabályozása is. Most jön képbe az előbb is emlegetett PWM az ESC-k kapcsán, ugyanis a késés megoldására kitalálták a OneShot125 protokollt. Ez két újdonságot vezetett be: a FastPWM-et és a SyncPWM-et.
FastPWM: az eddigi ciklusidő helyett (1-2 milliszekundum) az új protokoll sokkal gyorsabban adja le a motor számára az időzítést (nagyjából nyolcszor, vagyis ha leosztjuk az 1 milliszekundumot 8-al, akkor 125μ szekundumot kapunk, innen került a protokoll nevébe a 125-ös jelző). Ezzel akár 4 kHz-es PWM frekvencia is elérhető, vagyis sokkal gyorsabb.
SyncPWM: a SyncPWM szinkronizálja az FC által a motornak és az ESC-nek kiküldött PWM parancsokat, vagyis egy ciklus alatt csak egyetlen vezérlő parancs megy ki, így megszűnik az eddigi újraírás és így 20% javulás érhető el, mivel az ESC már azelőtt beírja az új értéket a motorba, mielőtt az FC új parancsot adna ki. Ezt a módot angolul "one shot"-nak hívják, így áll össze a név: SnycPWM+FastPWM= Oneshot125.
Összefoglalva a fentieket, mivel csökken az elektronikus áramköri elemek késleltetése, a multikopter gyorsabban reagál a vezérlőjelekre, ezzel mi is "élesebbnek" érezzük az irányítást, így jobb reakcióidőket érhetünk el.
Active breaking: Van még egy fontos dolog, amit meg kell említenünk az ESC-vel kapcsolatban, ez pedig a "Support Damped Mode" vagy más néven Active breaking. Normális esetben, ha elvesszük az áramot egy elektromos forgómotorról, akkor a lendület miatt a motor tengelye és ezzel együtt a propeller tovább fog forogni, addig amíg a forgómozgás energiája el nem enyészik a levegő ellenállásán. Ez a jelenség a tengely és a propeller tehetetlenségéből adódik, így a motor lassabban reagál a jelváltozásra. Amennyiben az ESC támogatja a damped mode-ot, akkor gázelvételre automatikusan fékezni kezdi magát a motor, ennek köszönhetően pedig gyorsabban fogja a fordulatszámát változtatni. Az ESC képes a motort fékezni, így sokkal gyorsabb irányváltás oldható meg.
Nézzünk egy példát arra, hogy mit találunk egy OneShot125 protokollal felvértezett ESC gyári specifikációjában.
FVT LittleBee 20A ESC BLHeli OPTO 2-4S Supports OneShot125 For RC Multirotors




