FPV for dummies I. - FPV alapok: A KAMERA
 Végre aktualitását nyerte az FPV, mivel megvettem az Emax Nighthawkot, ami tartalmazza a komplett sort (kivéve a végmegjelenítő berendezést), ezért most belecsapunk a lecsóba. Rengetegen kérdeztek az FPV-vel kapcsolatban, hogyan működik, milyet vegyenek stb. de ez egy meglehetősen bonyolult téma, tehát várható néhány cikk, pont úgy ahogy azt a távirányítók kapcsán is tettük, szóval mindenki sorozatra készüljön. Let's get it to rumble.
Végre aktualitását nyerte az FPV, mivel megvettem az Emax Nighthawkot, ami tartalmazza a komplett sort (kivéve a végmegjelenítő berendezést), ezért most belecsapunk a lecsóba. Rengetegen kérdeztek az FPV-vel kapcsolatban, hogyan működik, milyet vegyenek stb. de ez egy meglehetősen bonyolult téma, tehát várható néhány cikk, pont úgy ahogy azt a távirányítók kapcsán is tettük, szóval mindenki sorozatra készüljön. Let's get it to rumble.
AZ FPV A First Person View rövidítése, vagy magyarra fordítva "belső nézetes repülés", bár természetesen ez a kifejezés elég kacska. Alapesetben egy géppel úgy repülünk, hogy repülés közben nem a távirányítót, hanem a gépet nézzük, ez az úgynevezett LOS (line of sight) repülés, ilyenkor a szemünkkel követjük a gépet. Lehetőség van azonban úgy is repülni, hogy a LOS-on kívülre kerül a gép, vagyis szabad szemmel nem látható. A lényeg az, hogy a multirotoros gépünk kameraképét egy megjelenítő eszközre közvetlenül kivetítjük, így magát a gépet egyáltalán nem kell, hogy lássuk, hiszen az átvitt képen keresztül történik a vezérlés. Az FPV-ket alapvetően két dologra szokták használni: látótávolságon túli repülésre, amikor még a távirányító fogja a gép jelét, de mi már szabad szemmel nehezen, vagy sehogy sem látjuk a gépet. A másik eset, amikor a géppel be akarunk repülni valamilyen objektumba vagy objektum mögé és így takarásba kerül a gép vagyis nem tudnánk irányítani normális esetben. A kép segítségével azonban megmarad a kontrollunk, illetve olyan felvételeket is készíthetünk, amelyekre normális esetben - a rendszer nélkül nem lennénk képesek (ez persze feltételezi, hogy az FPV-jel még eljut a vevőhöz, tehát ne ólomtartályokon próbáljuk ki).
Milyen előnyei vannak az FPV repülésnek:
- sokkal realisztikusabb élményt nyújt a repülés, hiszen azt az érzetet kelti, mint ha a gépben ülnénk
- precízebben lehet irányítani a multikoptert
- sokkal agilisabban tudunk repülni, mivel sokkal gyorsabban tudunk reagálni a különböző helyzetekre
- messzebbre és magasabbra tudunk repülni, hiszen nem kell LOS-on belül lennie a gépnek
Alap esetben, a pár tízezer forintos gépek két módon kommunikálnak FPV közben. Az olcsóbb típusok 2.4 GHZ-n, pont úgy, ahogy a távirányító is, lássuk be, ez nem túl szerencsés, hiszen zavarhatják egymást. Pont úgy, ahogy a Bluetoothos eszközök, a WIFI routerek és még ezer másik dolog, ami ezen a frekvencián kommunikál. A módszer előnye, hogy olcsó és a kép kitehető android alapú eszközökre - telefon, tablet - illetve Apple IOS alapúakra is. Cserébe viszont nagyjából használhatatlan, a hatótáv az olcsó gépeknél nem több mint 50 méter és ott is óriási a késés. Én ilyen gépet senkinek nem fogok ajánlani (persze vannak viszonylag jó megoldások, pl. DJI) de aki felmegy valamelyik kínai webshopra, az százával találhat ilyen verziókat, amelyeket általában W-vel jelölnek a névben.
Aki normálisan akar FPV-zni, az 5.8 GHZ-s, analóg jelátvitelt fog preferálni. Ez sokkal megbízhatóbb mint a WIFI-s verzió, cserébe viszont jobban megterheli a pénztárcánkat is. Mivel a mobil eszközök nem kommunikálnak 5.8GHZ-n, ezért a kép rájuk való kivetítéséről le kell mondanunk. Néhány típus a teljesség igénye nélkül, amin van FPV kijelző a távirányítóban vagy a külön monitorként:
- WLtoys V686G: 5.8GHZ FPV, külön monitoros, teszt a blogon
- Hubsan X4 104 D: 5.8GHZ FPV, távirányítóval egybe építve
- JJRC H11D: 5.8GHZ, külön monitoros
- JXD 509G: 5.8GHZ, külön monitoros
- Eachine Racer 250: 5.8GHZ, külön monitoros
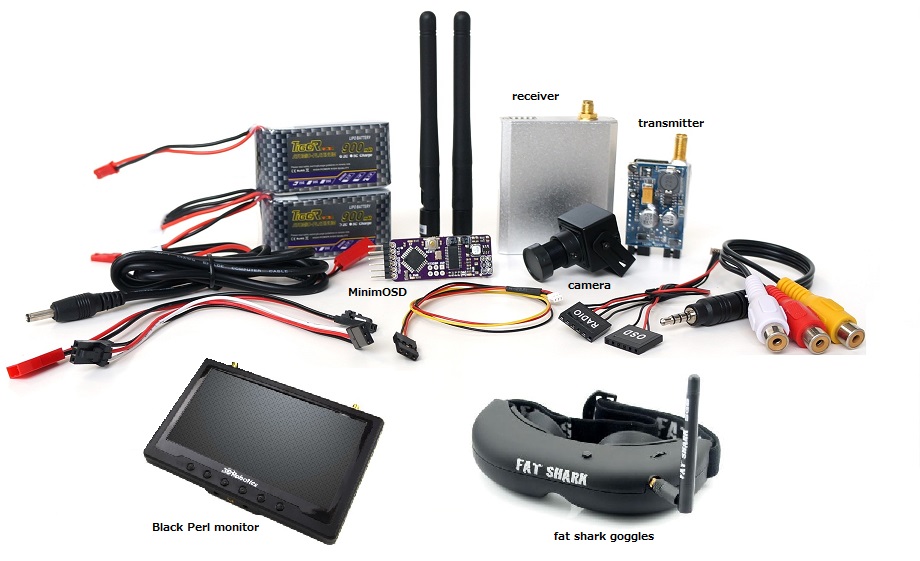
Beszéljünk most arról, hogy milyen elemekből áll egy működő FPV rendszer:
- kamera
- videó adó (VTX)
- videó vevő (VRX)
- képmegjelenítő eszköz
Az adás iránya itt pont fordított, minta távirányító esetében, hiszen ott a távirányító az adó, a drón pedig a vevő oldalon helyezkedik el. Ezzel szemben a gépen elhelyezkedő kamera egy adóra közvetíti a képet, amelyet a vevő oldal átvesz és közvetíti valamilyen képmegjelenítő eszközre. Az FPV rendszerekhez még egy fontos dolgot szoktak hozzácsatolni, ez pedig az OSD vagyis az On Screen Display. Az FPV rendszeren keresztül nem csak képet lehet átadni, hanem a gép különböző telemetria adatait is, amit a képernyőre tudunk vetíteni. Így már érthető, miért olyan kényelmes pl. szemüvegben repkedni.
Vegyük most sorra az összes elemet, amely az FPV rendszert alkotja.
1. FPV KAMERA
Normális esetben megszoktuk, hogy a kamera által készített kép felbontását sor*oszlop arányban adják meg, pl. 1080p azt jelenti, hogy 1920 pixelt (sor) 1080-szor rajzolunk ki a képre (oszlop) így a videó felbontása 1920*1080 pixel lesz, ami 2.073.600 pixel, vagyis 2MP. Ennél persze az érzékelők nagyobb felbontásra is képesek, pl. a 4K videót 2160p-nek jelölik, ami 4096*2160 pixelt jelent, ami 8.847.360 pixel.
Ehhez képest viszont azt láthatjuk, hogy az FPV kamerák esetében nem ezt a felbontást tüntetik fel, hanem a TVL, vagyis a TV lines értéket. Ez azt határozza meg, hogy a kamera egymás alatt hány sort képes megjeleníteni és ez még az analóg TV adásos időkből származik. Szerintem számunka nem is lényeges, hogy a TVL miből tevődik össze, de azt lehet általánosan mondani, hogy a 600TVL-es kamerák képe már tűrhető. Akit érdekelnek a különbségek, az nézegesse az alábbi linket: Security Camera Warehouse, itt jól láthatóak az eltérések. A TVL módot egyébként bemutatja a Real Drone Simulator, amelyben a C gomb nyomkodásával át tudunk váltani belső nézetes FPV-re, ahol a monitorunkon kirajzolódnak a TV sorok.
A kameráknak van egy másik fontos paramétere, hogy hogyan alakítja a képet elektronikus jelekké. Ez elsősorban attól a fényérzékeny lapkától függ, amit a kamera tartalmaz. Ez lehet CCD (couple-charged device) vagy CMOS alapú. A CMOS-nak nagyobb a fényérzékenysége, a dinamikus tartománya, kevesebb képzajt szed össze, cserébe viszont drágább és a Rolling-Shutter nevű kép feldolgozó algoritmust használja ami okozhat hullámzást. A Banggood számtalan CCD kamerát árul, amelyet itt tekinthettek meg. Természetesen lehet olyan kamerával is repülni, amely CMOS alapú és árulnak is ilyeneket FPV-zésre, pl. Mobius Action cam (Eu-ból), Runcam HD és Runcam HD2 (a runcam most nagyon olcsó a Banggoodon, szóval azért ennyiért még is lehet egy alternatíva, ha más nem, kamera gépre). Mivel nincsen tapasztalatom abban, hogy milyen a CCD és a CMOS kamera képe, egymással összehasonlítva, ezért fogadjuk el Oscar Liang cikkében írtakat, hogy érdemesebb CCD alapú kamerákkal FPV-zni (de azért személtetem egy jó csajjal:D.
Amit még érdemes megemlíteni a fenti CMOS kamerák kapcsán, hogy mindegyiknek van video out kimenete, amin át tudják adni a képet. Ez általában composit jel, illetve Pal vagy NTSC szabványú, van olyan kamera amin ez kapcsolható.
Na és mi a helyzet a népszerű Xiaomi Yi (EU-ból), Eken H9 (Eu-ból) és SJCAM SJ4000 (szintén EU) kamerákkal? Mind CMOS-érzékelősek, ráadásul nagy homlokfelületűek, amik fölöslegesen tolják maguk előtt a levegőt. Repülni persze lehet velük, a brushless FPV gépek elég erősek hozzá, de nem erre találták ki őket. Ennek ellenére felhívnám a figyelmet egy érdekes eszközre, ez pedig az Eachine Light L250 5.8GHZ elektronikai panel, amely illeszkedik a Gopro kamerák USB portjára és FPV képessé teszi azokat.
Ha már az előbb említettem a video out csatlakozót, a videó adások két nagy típusát szoktuk megkülönböztetni (persze van még más is, pl. Secam, Mescam stb. de őszintén ki használja drón repülésben ezeket?) :
- PAL: 720*576 pixel 25FPS ; Európa, Afrika, Ausztrália
- NTSC: 720*480 pixel 30FPS; USA és Japán
A fentiekből kiderül, hogy a PAL nagyobb felbontású (szebb kép) az NTSC viszont nagyobb képkocka sebességű (a kép folyékonyabbnak érződik). Ma már mind a kettőt szokták támogatni.
A késleltetésről fontos még néhány szót ejteni, hiszen ez egy esszenciális paraméter a repüléshez. Minél gyorsabb, annál jobb, lassú kép lassú reakcióidőt jelent, ezért a versenyzők számára ez a legfontosabb paraméter. Ez az érték az FPV-re dedikált kameráknál jellemzően sokkal jobb, mint az általános felhasználásra szánt kamerák esetében, amilyenek az akciókamerák. Ha FPV ből szeretnél repülni kerüld az akció kamerát.




