Konfigurálás Baseflighttal II. - Emax Nighthawk alapbeállítások
 Az előző "Konfigurálás Baseflighttal I." cikkben ott hagytam abba, hogy megnéztük, hogy lehet leellenőrizni a távirányító működését. ígérem, hogy mivel az előző rész nagyon hosszú lett, igyekszem rövidebbre fogni, pedig a lényeg még csak most jön:D A cikk végén pedig találtok majd egy listaszerű összefoglalót, hogy mit állítsatok egy olyan gépen, ami ARF verzióban érkezik.
Az előző "Konfigurálás Baseflighttal I." cikkben ott hagytam abba, hogy megnéztük, hogy lehet leellenőrizni a távirányító működését. ígérem, hogy mivel az előző rész nagyon hosszú lett, igyekszem rövidebbre fogni, pedig a lényeg még csak most jön:D A cikk végén pedig találtok majd egy listaszerű összefoglalót, hogy mit állítsatok egy olyan gépen, ami ARF verzióban érkezik.
MODE SELECTION MENÜ
A program legfontosabb része, ugyanis itt lehet beállítani a távirányító AUX kapcsolóit. Az AUX egy olyan többállású kapcsoló/potméter, amelyre funkciók programozhatóak ki, amely a távirányító egy csatornáját fogja elfoglalni. Ha emlékeztek rá, a csatornaszám fontosságát már több távirányítós cikkben fejtegettem, de most saját magatok is megtapasztalhatjátok, mennyire komoly korlát az alacsony csatornaszám.
Az AUX kapcsolókat általában repülésmód váltásra, fények ki-be kapcsolására, buzzer aktiválására stb.-re szoktuk használni. Az én távomon összesen két kapcsoló van, egy AUX1, amivel a repülési módokat, illetve egy AUX2 csatlakozó, amivel a buzzert tudom aktiválni (és ellentétben azzal, amit először írtam, az AUX1 a jobb oldali).
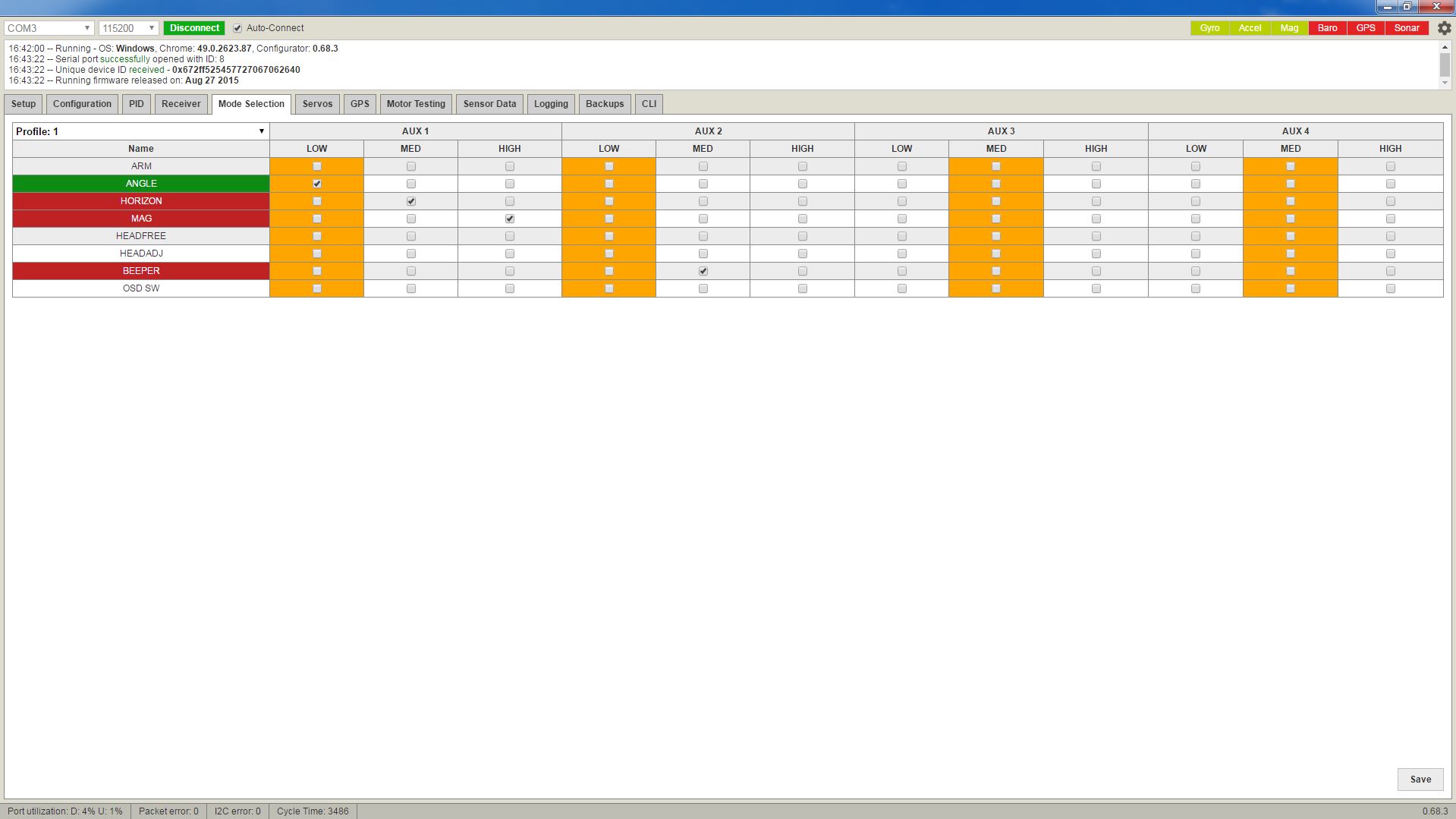
Bal oldalon látthatjuk a Profile 1 feliratot. Ez egyben azt is jelenti, hogy felvehetnénk több profilt is az állítgatáshoz, hiszen a program képes több gép profilját is eltárolni. Mivel én a Baseflightból csak egyetlen egy gépet állítottam, nekem ez maradt az 1-esen. Alatta mindenféle érdekes feliratot láthatunk, míg az oszlopfejlécben az AUX szót és egy számot. Ez a már előbb is említett "auxiliary" vagyis a kiegészítő kapcsolókat jelenti a távon, tehát mindent, ami nem a két fő irányítópálca. Ez egyben azt is jelenti, hogy amikor ezeket a távirányítón kapcsolgatjuk, akkor ugrani fognak a megfelelő pozíciók a programban (ezt láthatjuk sárga jelöléssel, a képen az első két kapcsoló a legfelső, low állásban áll). Kanyarodjunk vissza egy kicsit a bal oldali oszlopra, ahol a funkcióneveket láthatjuk. Nézzük sorban, melyik mit csinál:
- ARM: vagyis élesítés, mint látható, nekem egyik oszlopban sincsen pipa. Én a gépet a gyári, a gázkart jobbra lehúzva és három másodpercig ott tartva szekvenciával élesítem, de kitehetném pl. az egyik AUX kapcsolóra. Ilyenkor ahová a pipát teszem, ott fognak élesedni a motorok. Az ARM más dolgokat is csinál, ezt az ACRO mód részben olvashatjátok.
- ACRO(MANUAL,RATE): Az ACRO ebben az esetben szorosan kapcsolódik az ARM-hoz. Ha alapból semmilyen más mód nincs bekapcoslva, akkor az ARM-olás automatikusan ACRO módba teszi a gépet. Ez egyben azt is jelenti, hogy ha kivesszük a pipákat a többi módból és áttesszük a gépet ARM-ba, akkor az ACRO mód aktivizálódik (de ezt cselesen nem jelölik az oszlopok). Az ACRO mode az "acrobatic" szó rövidítése, vagyis hogy nincs accelerométer tehát a gép nem fog stabilizálni a kar elengedése után SEM, hanem abban az állapotában marad, amiben hagytuk. Ha be volt döntve, akkor úgy repül tovább. Ez azért ijesztő eleinte, mert így simán földbe kenhetjük a gépünket anélkül, hogy ezt akarnánk. Az ARM-ot csak akkor használjuk önmagában, ha már elég tapasztaltak vagyunk, ha nem, akkor hagyjuk ANGLE vagy HORIZON módban. Ha nem akarjuk kapcsolni a távról az ARM szekvenciát, de akarunk ACRO modeot, akkor hagyjuk az utolsó sort üresen. Ilyenkor a gép AUTOMATIKUSAN ACRO modeba kapcsol, mivel nincsen semmilyen egyéb mód ami befolyásolná a működését, vagyis az ACRO mode a többi, a repülést befolyásoló mód hiánya is egyben. CSAK giroszkópot használ.
- ANGLE: Az angle mode egy teljesen stabilizált mód. Ez azt jelenti, hogy mind a giroszkóp, mind pedig a gyorsulásmérő bekapcsolt állapotban van és nem engedi a gépet túldőlni egy ponton (50 fok), illetve ha elvesszük az iránykarról a kezünket (megszűnik a jelközlés), automatikusan visszaáll a gép középre. Szokták STABILIZED modenak is hívni. Ez direkt a kezdőknek van, én is ebben repülök jelenleg, amíg nem érzem úgy, hogy át merem tenni a gépet egy másik módba. Giroszkópot és gyorsulásmérőt használ.
- HORIZON: HORIZON mode-ban a gép úgy viselkedik, mint ha ANGLE módban lenne, vagyis stabilizál, de a karok teljes kitolásával ACRO módú gépként viselkedik. Ez azt jelenti, hogy engedi a bukfenceket és más akrobatikus elemeket, de ha középre húzzuk a karokat, akkor stabilizál. Ez egy fajta átmenet a két mód között, amikor már úgy érezzük, jól kezeljük a gépet, próbából áttehetjük HORIZON-ba. Giroszkópot és gyorsulásmérőt használ. /Szerk.: 2016.03.26: ma tettem először át a gépet HORIZON-ba, 2 akksi alatt 4x hoztam vissza a repceföld közepéről, de hogy ez mennyire jó, isten.../
- MAG: magnetométer, vagy más néven iránytű. Ezzel a szenzorral rendelkezik a Nighthawk, vagyis ha ezt bekapcsoljuk, de nincs iránytű bemenet a gépen, akkor az utolsó irányba fog repülni a gép és ezt fogja ismételni, egy fajta ACRO módot létrehozva (mivel tartja az irányt és a dőlésszöget a végtelenségig). Én próbából állítottam be, egyszer megnéztem, de olyan durván nehéz volt vele repülni, hogy egyelőre kivettem a pipát, vagyis így is ACRO-ba lehet kapcsolni (ez persze engem minősít és a tudásszintemet, nem a gépet)
- HEADFREE/HEAD ADJ.: Ez gyakorlatilag a GPS alapú headless mód. Mindig egy 2D-s sík szerint mozdul a pitch és a roll irányába (amerre húzzuk a jobb kart, Mode2 beállítás esetén). Aki racerrel repül, annak nincs különösebb jelentősége, mert sosem fogtok így repülni. Accelerométert, giroszkópot, magnetométert használ.
- BEEPER: hangjelző készülék aktivizálására szolgál, Emax Buzzer néven kapható a Nighthawkhoz. A lényege, hogy ha bekapcsoljuk a feszültség figyelést, automatikusan csipog a buzzer. Mi azonban kitehetjük egy AUX kapcsolóra, ilyenkor a távról is vezérelhető a hangjelzés, ami hasznos, ha beesett a bokorba a gép és keresni kell.
- OSD SW: ez a telemetriát hivatott ki és bekapcsolni. Én személy szerint konstans bekapcsolnám a telemetriát, mert nagyon hasznos látnunk, hogy pl. mekkora feszültség van az akkumulátorban vagy hogy milyen magasan vagyunk.
Vannak még egyéb repülési paraméterek is, amelyeket lehet konfigurálni, pl. Altitude Hold, GPS hold, Baro stb. ezek jellemzően kamera platformhoz köthető dolgok, akit bővebben érdekel, az ebből az Oscar Liang cikkből okosodhat.
MOTOR TESTING
Átugrottam a servo és a GPS füleket, itt nincs mit állítanunk az esetek nagy részében, ha racer gépet birtoklunk. Azért hogy mondjak egy ellenpéldát is: Walkera Runner 250-nek van GPS alapú verziója, ott értelemszerűen a GPS fül konfigurálható lenne.
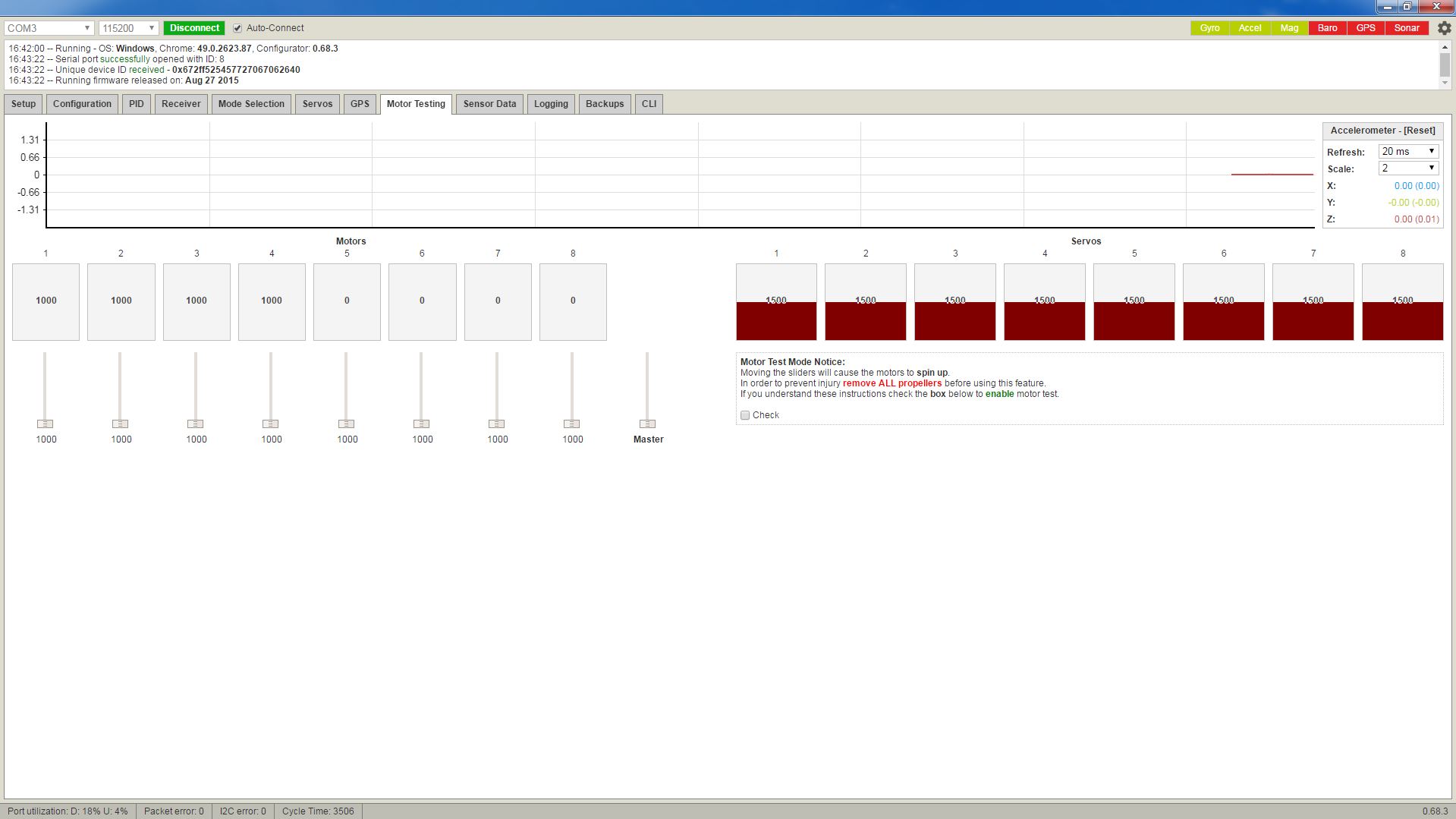
Ami viszont mindenkinek van, az 4 db motor. Ezek esetében ráadásul kalibrálni kell az ESC-ket, különösen ha ARF verzió esik az ölünkbe. Itt hívnám fel a figyelmet pont ugyan arra, amire a program is figyelmeztet szép piros betűkkel, hogy NEHOGY PROPELLERREL BOHÓCKODJUNK EZEN A FÜLÖN. HA EDDIG NEM TETTÜK VOLNA, MOST VEGYÜK LE, DE AZ A JOBB, HA FEL SE TETTÜK.Ezen a fülön ugyanis a kis checkbox bepipálása után és a csúszkák mozgatásával szabályozhatjuk a motorok teljesítményét, vagyis ez nem játék.
Az ESC-ket az alábbi módon kell kalibránunk:
- ha eddig be volt dugva, húzzuk ki az akkumulátor tápcsatlakozóját
- klickeljük be a pipát a CHECK fülnél, most semminek nem szabad történnie hiszen SE A PROPELLEREK NINCSENEK FELTÉVE SE AZ AKKUMULÁTOR NINCSEN BEDUGVA
- a MASTER potmétert húzzuk maximumra, láthatjuk, hogy az összes érték felment 2000-re
- dugjuk be az akkumulátort, ekkor halljuk az ESC-k boot szekvenciáját, de nem a megszokott hangon
- húzzuk le a MASTER potmétert, ekkor nyugtázza az ESC hanggal az előbbi beállítást
- klcikeljük ki a CHECK fülnél a pipát és kész is a kalibrálás
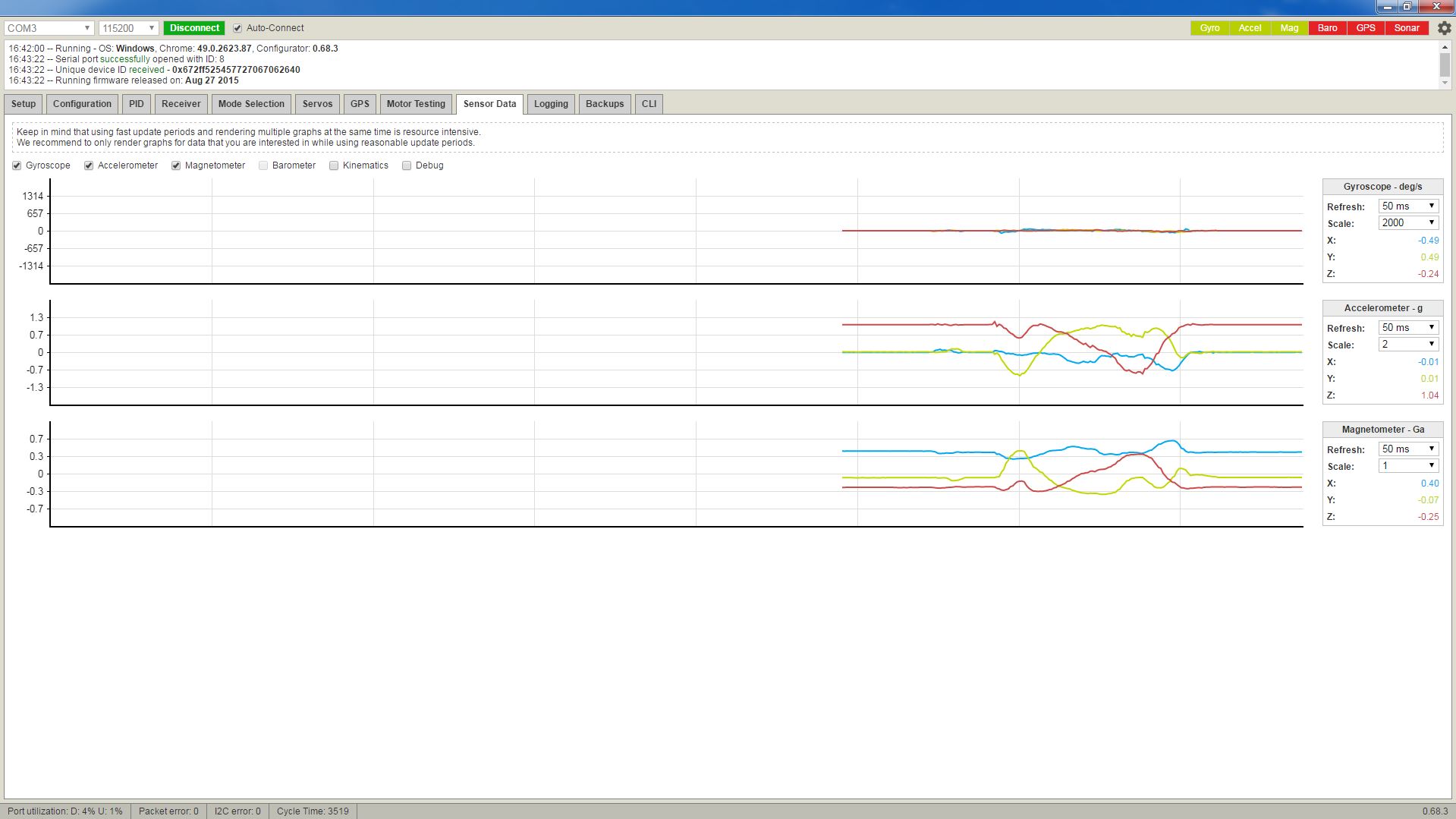
SENSOR DATA/LOGGING/BACKUPS MENÜ
Egy-egy mondat erejéig erre is kitérnék. Műszaki beállítottságúak örülni fognak a sensor data fülnek, ahol a vezérlő által kiadott szenzorok jeleit lehet nyomon követni. Ott ahol a görbék kitérnek, a vízszintes pozíciótól eltérő értékek találhatóak, ezt én produkáltam a gép szándékos mozgatásával, hogy legyen mit betenni a cikkbe, illetve hogy lássam, működnek-e a dolgok (jelentem, igen:D).
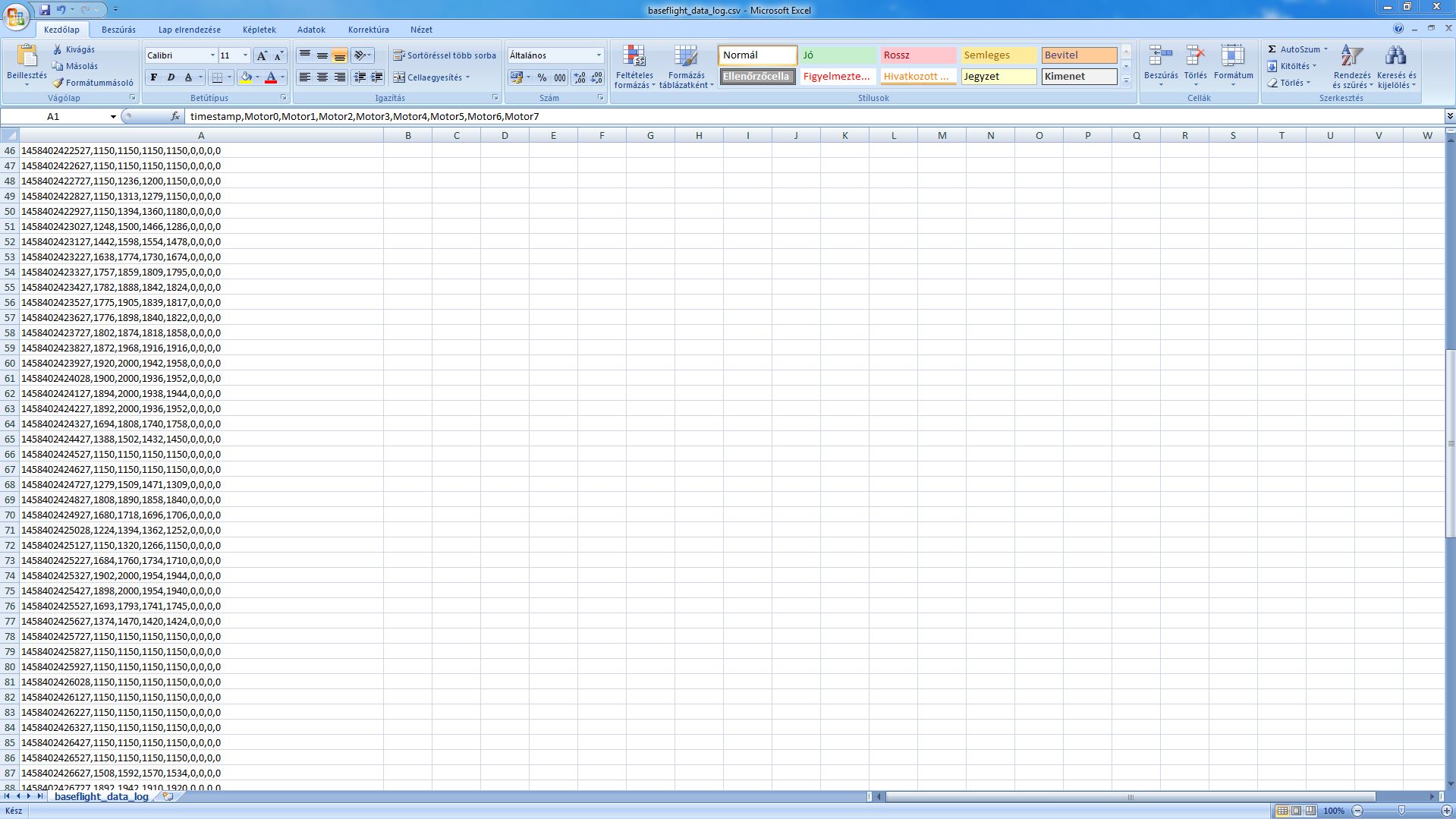
A logging fül alatt a gép konfigurálás alatt elmentett paraméterei hívhatóak elő "statisztikai" formában. Ez egy .CSV fájlba kerül, amelyet utána fel tudtok olvasni, pl. Excelben. Én megjárattam a motorokat, hogy lehessen látni a logolást. A bevágott képen jól lehet látni, hogy a minimum armolási forgási érték(1150, akkor még ennyi volt) és a maximum(2000) érték között rángattam a throttle kart, mindent a kedves olvasóért:D

A Backups menüben a beállításainkat tudjuk elmenteni a Backup és visszatölteni a Restore menüvel. Én azt javaslom, hogy mielőtt széjjel állítgatjuk a dolgokat, előtte mentsük el a gyári állapotot az alábbi formában: [GÉPNÉV]_[DÁTUM]_[MEGNEVEZÉS] vagyis pl. az enyém: NIGHTHAWK280_20160324_DEFAULT lenne.
CLI MENÜ
CLI vagy más néven COMMAND LINE INTERFACE, amit magyarul parancssornak szoktak fordítani. Aki járatos az informatikában, illetve hálózatos területen esetleg vagy linuxos környezetben otthonosan mozog, annak nem lesz újdonság a dolog, mindenki másnak viszont igen. A CLI lényege, hogy bizonyos parancsokat csak parancssorból lehet kiadni, mert nem programoztak hozzá grafikus felületet, ilyen pl. a firmware verzió kiíratása /version+ENTER/ vagy pl. a a bekapcsolt funkciók ellenőrzése /feture+ENTER/. Nem mennék bele mélyebben, mert az emberek 99%-ának nincs erre szüksége, de lehet hogy a PID tuning kapcsán ejtünk róla szót.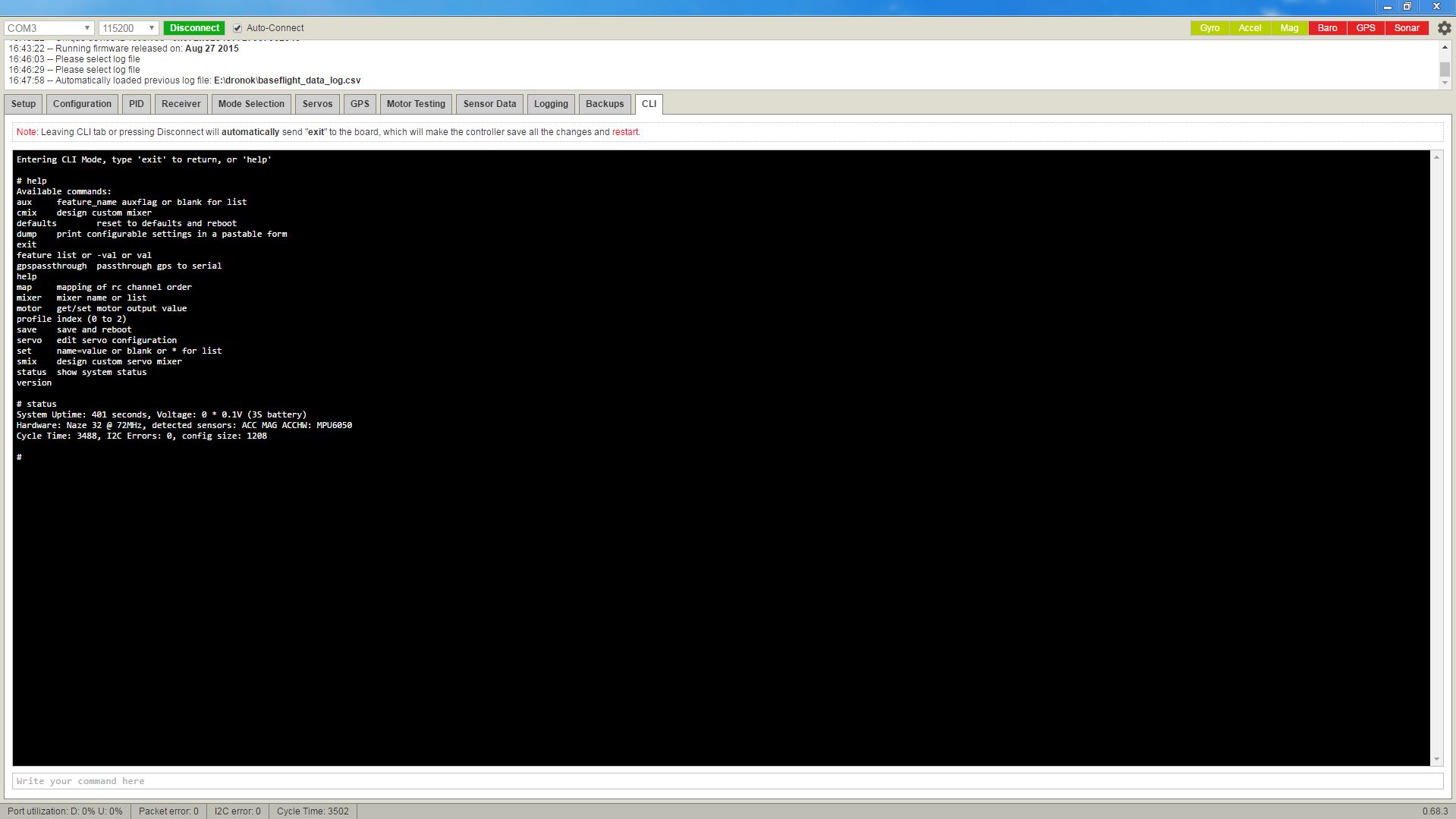
Akit behatóbban érdekel a Skyline 32 vezérlő Baseflightból való programozása, az az alábbi kézikönyvben találhat még információkat.
Ne felejtsétek elmenteni a beállított értékeket az adott fülön, alul a SAVE gombbal!
ÖSSZEFOGLALVA
Összeszedtem a lényeget, vagyis hogy milyen beállításokat kell elvégeznünk egy ARF gép kapcsán, ami minimálisan szükséges ahhoz, hogy a gép fel tudjon szállni:
- A Backup fülön mentsük el az alapbeállításokat
- Giroszkóp és gyorsulásmérő kalibrációja a setup fülön
- Funkciók ki és bekapcsolása a Configuration fülön, illetve ha elforgattuk a vezérlőt akkor a Board Alignment menüben be kell állítanunk, mennyi az elfordítás mézéke
- Receiver menüpontban nézzük meg, hogy a távirányítónk a megfelelő csatornákon a megfelelő módon reagál-e
- Mode selection menüben állítsuk be a csatornákat a kívánt repülési módokhoz
- A motor testing fül alatt kalibrálnunk kell az ESC-t
- A Backup fülön mentsük el más néven az új beállításainkat
A sorozat előző része:




