Géptörés, emax buzzer, VBAT okosítás, active brake bekapcsolása
 Elég durván összetörtem az Emax Nighthawkot, amelyet egy igen banális, ám annál szembetűnőbb hiba okozott, amelyre Mgy kolléga hívta fel a figyelmemet, akit leginkább úgy tudnék jellemezni, hogy "az elméleti repülésben nagy tapasztalatra szert tett szakember". A nagyon sok szimulátorozása mindenesetre arra jó volt, hogy rámutasson arra, milyen rosszul is fordulok a gépemmel a levegőben. A probléma abból fakad, hogy túl sok yaw-t - vagyis tengelykörüli forgást - használok ahelyett, hogy bedönteném a testet, emiatt a gép sodródik. Mivel túlságosan kisodródom, ezért pánikba esek, elveszem a gázt, így fordulás közben (ahol ugye az átellenes motorok dolgoznak) a gép leejti a farát, a kar leér és már is jön a 15x-ös cigánykerék a földön. Na ezért törtem össze a gépet.
Elég durván összetörtem az Emax Nighthawkot, amelyet egy igen banális, ám annál szembetűnőbb hiba okozott, amelyre Mgy kolléga hívta fel a figyelmemet, akit leginkább úgy tudnék jellemezni, hogy "az elméleti repülésben nagy tapasztalatra szert tett szakember". A nagyon sok szimulátorozása mindenesetre arra jó volt, hogy rámutasson arra, milyen rosszul is fordulok a gépemmel a levegőben. A probléma abból fakad, hogy túl sok yaw-t - vagyis tengelykörüli forgást - használok ahelyett, hogy bedönteném a testet, emiatt a gép sodródik. Mivel túlságosan kisodródom, ezért pánikba esek, elveszem a gázt, így fordulás közben (ahol ugye az átellenes motorok dolgoznak) a gép leejti a farát, a kar leér és már is jön a 15x-ös cigánykerék a földön. Na ezért törtem össze a gépet.
Később egy másik hibát is elkövettem, ugyanis kimentem nedves időben repülni. Annyi eszem azért volt, hogy nem a fű fölött repkedtem, nehogy az elektronika vizet kapjon, így viszont a homok tapadt mindenhova, ami a motoroknak nem nagy barátja, ellenben a "csapágyas lett" szót sokszor kötik össze vele. A fenti két jelenség hatására egy igen tetemes veszteséglistát sikerült felhalmoznom:
- két motor megszorult
- a kamerából kiszakadt a kábel
- eltört a middle board azon a részen, ahol az FPV adó is található
- az FPV adóból kiszakadt a kábel
- kiszakadt két akkumulátorból az XT60-as csatlakozó
- elgörbültek a leszállólábak
- elhagytam a kamera műanyag takarósapkáját
Először is egy "szolgáltai közlemény": azt hiszem nem fogom tudni eléggé meghálálni Marciartnak azt a rengeteg munkát, amit azért ölt a gépbe, hogy ismét jó legyen és a kvalitásait jól mutatja, hogy mindent sikerült is helyre tennie, a gép régi pompájában csillog (amíg újra össze nem töröm:D).
A fenti hibákból a két kiszakadt kábelt gyorsan orvosolni lehetett, ahogy az akkumulátor problémáját is. Egyébként ez utóbbi azért következett be, mert az új akkumulátorok csatlakozója ANNYIRA szorul, hogy simán fel tudom emelni a kábelen keresztül a gépet (de ne tegyétek, csak a miheztartás végett írtam le), ami tökéletesen jó a kontakt hibák ellen, ám az eséseknél nem ereszt. Erre azt találta ki Marciart, hogy kihozza a PDB-ről az XT60-as kábelt, hogy szabadabban mozogjon és ne terheljék annyira a szoros akkumulátorok.


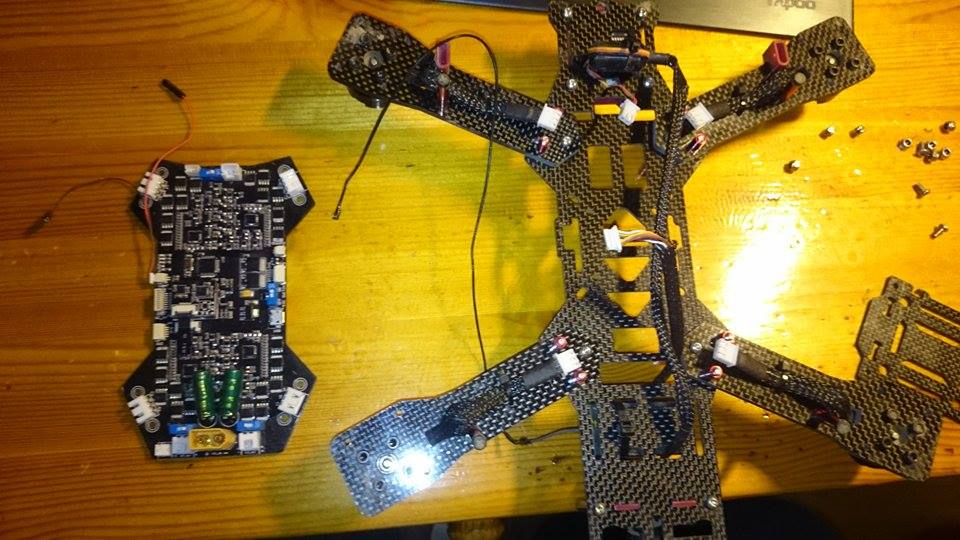




A middle boardot cserélni kell, kb. 3000 Ft és az egyetlen helyet tudott eltörni, az pedig az FPV túlnyúlás. A váz egyébként csillagos ötösre vizsgázott, a karok konkrétan törhetetlenek, a szendvicsszerkezet törhetetlen, a PDB-nek semmi baja, tehát az előzetes félelmeket semmi nem igazolta, vagyis az integrált ESC+vezérlő+PDB jól állja a sarat.
A motorokat ki kellett pucolni és szépen mennek tovább, ezt valószínűleg a beleragadt homok okozta, a tanulság annyi, hogy nem szabad kimenni nedves időben, illetve akkor sem, ha előző nap esett de már nem esik, mert az elektronika nem viseli túl jól (meglepő ugye?:D).
A két legnagyobb kínt az elgörbült leszállóláb és a 3 forintos műanyag takarósapka okozza, ugyanis egyszerűen nem találok erre a két filléres elemre cseredarabot. A láb egyébként nem egy jó konstrukció, erős de annyira azért nem, hogy mindent kibírjon, cserébe viszont a felülete is kicsi, ezért állandóan besüllyed vele a gép a homokba, földbe, vagy amire éppen letesszük. Eltávolítani viszont nem akarom, mert még is csak ott a PDB, szóval keresem rá a jó alternatív megoldást.
Hogy mire akartam kifuttatni a saját butaságomból következő hibákhoz kapcsolódó történetet? Arra, hogy a javításhoz elemeire kellett szedni a gépet és emiatt eléggé alaposan meg lehetett vizsgálni minden áramköri elemet. Nos jelentem, az Emax jelentősen túl van tervezve, ami különösen igaz a PDB-re. A 6045-ös propellerek áramfelvételétől egyáltalán nem kell félni, simán kibírják az áramköri elemek. A PDB egy hármas szendvicsszerkezet legalsó eleme, brutálisan masszív, ezen a részen a gép egyáltalán nem sérült. A felülete impregnált, tehát a nedvesség sem fog neki ártani. A karok rögzítési pontjai és a vastagsága példaértékű, szerintem nem is érdemes ezek után másmilyen vázat venni, csak karbont és abból is csak azt, amit 4 mm-es karral szerelnek. Összességében pont a drága alkatrészek - váz, pdb, vezérlő, esc - a legvédettebbek, látszik hogy átgondolt a konstrukció.
Ami viszont felettébb idegesítő, az a PDB-re forrasztott kapcsolók és csatlakozók elhelyezése. Egyrészt a gép testében rengeteg hely van, szóval akár ki is hozhatták volna ezeket a középlemezre, mert az akkumulátort már én is a gép tetejére rakom. Másrészt állandóan kell magammal vinni egy hosszú, hegyes tárgyat, amivel benyúlok a testbe, ha egy kapcsolót át akarok kapcsolni. A miheztartás végett ideírom a kapcsolók helyét, hogy ne keverjétek össze őket:
Hátsó kapcsolók:
- az FPV oldalán: 25mw-200mw adóteljesítmény váltása
- FPV után balra: ledcsík ki/be
- FPV után jobbra: FPV ki/be
Első kapcsolók:
- jobb oldali kapcsoló: ESC ki/be
- első bal: kamera
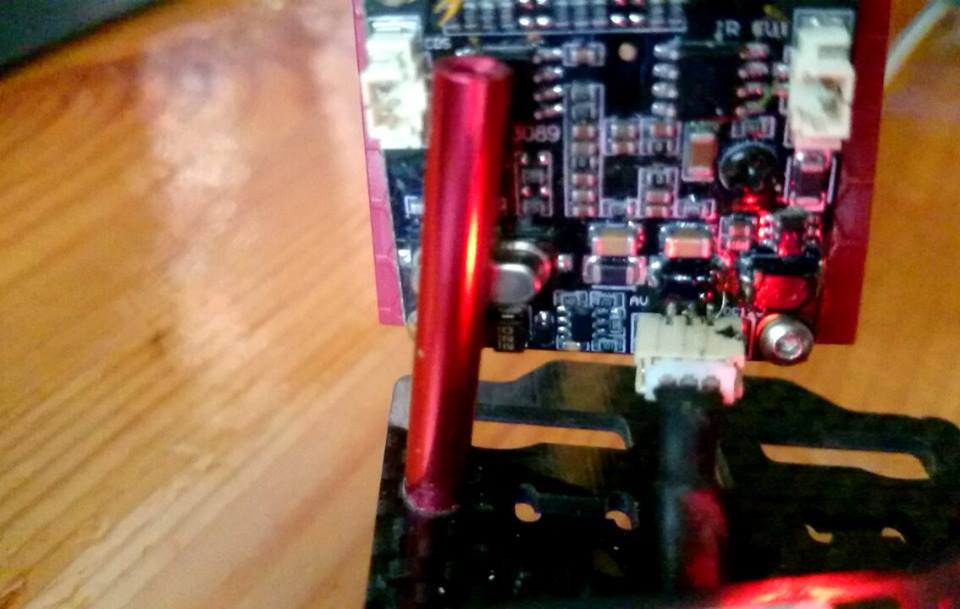
Ez utóbbi mellett van a VCC port, aminek az lenne a feladata, hogy kiolvassa a VBAT, vagyis battery voltage portról a feszültséget. A VBAT port a PDB oldalán található és adnak hozzá gyári kábelt, ám nem a VCC portra való csatlakozót tokozza rá az Emax, hanem helyette egy feldugható valamit, ami már egy erősebb fordulótól lejön a lábakról. Ez azért baj, mert innentől kezdve nincsen VBAT jelzésünk, jobban mondva a vezérlő azt hiszi, hogy nulla a feszültség, ezért elkezdi sípoltatni az Emax csipogót. Ilyenkor értelemszerűen a távról sem tudjuk kikapcsolni, mert konstans sípol. Ez egy elég idegesítő dolog, ráadásul a VCC portot a middle deck és a felső lemez is takarja, tehát mindenféle trükkösen görbített fogókkal tudunk csak benyúlni egy pici lyukon keresztül, hogy helyére tegyük azt a csatlakozót, ami majd újra le fog esni. Én jelenleg most ott tartok, hogy nemes egyszerűséggel leszereltem a buzzert, hogy ne tudjon csipogni és az akkumulátor balansz portjára feltettem egy nem gyári csipogót, hogy legalább azt jelezze, mennyi a cellánkénti feszültség (low voltage alarmot 3.5V-re állítottam). Aki be akarja kötni, az a lenti videón egyébként megnézheti, hogyan kell. Keresem a VCC-hez tartozó csatlakozót, de egyelőre nem találtam még rá.
A gép alapból tudja az active breakinget, ez a funkció nem hagyja forogni a motorokat a saját tehetetlenségüknél fogva, hanem nullára tudja őket fékezni, irányváltás előtt. Ez gyorsabb és agresszívabb irányváltást tesz lehetővé azzal, hogy megállítja a motorforgást. A trükk az, hogy Cleanflight/Baseflight alatt, a motor beállító fülnél be kell lépnünk a konfiguráló módba, amely folyamatosan sípjeleket cirkuláltat körbe-körbe. A megfelelő sípjel után a jó ütemben végrehajtott parancsok segítéségével aktiválhatjuk a funkciót, pont úgy, ahogy azt a lenti videóban is láthatjátok.
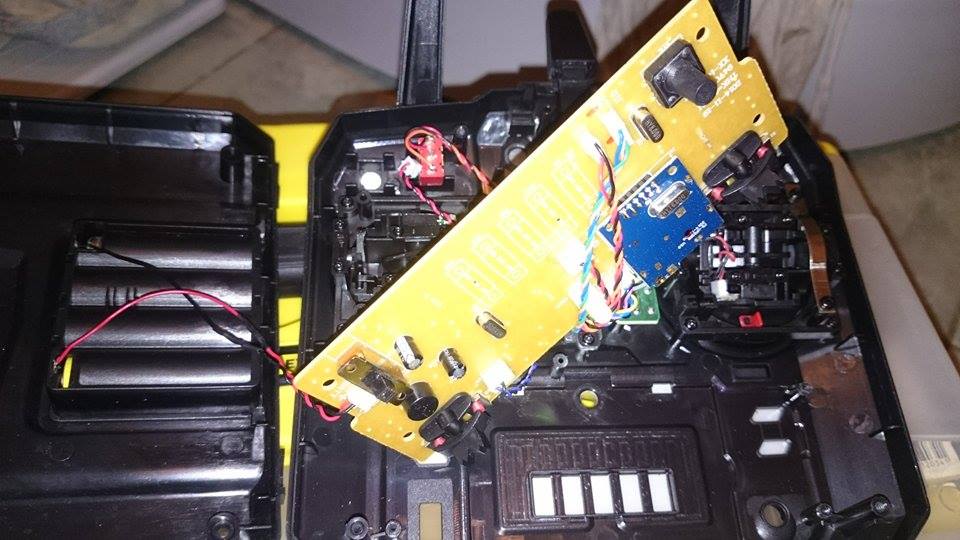
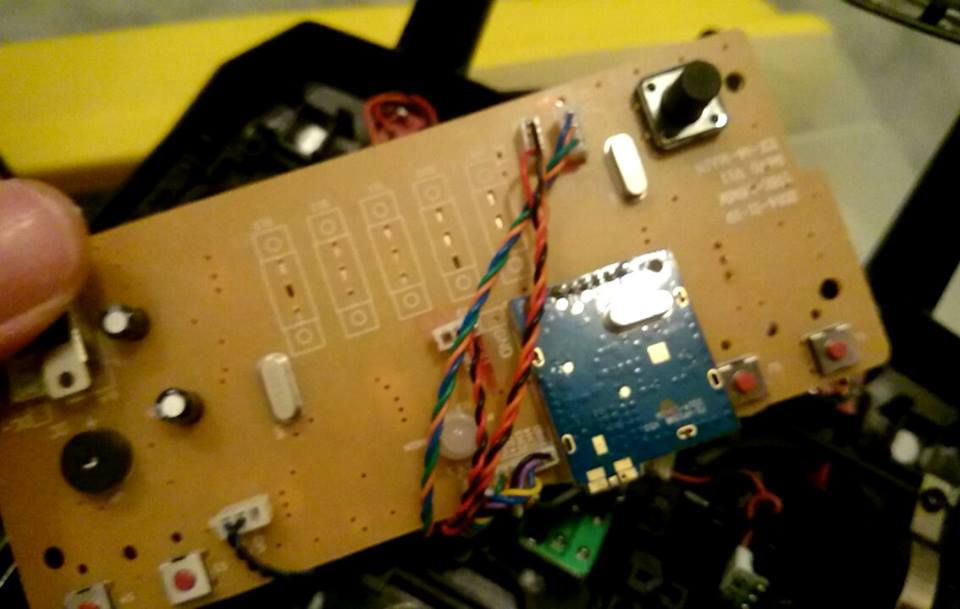
A távirányítóm is zárlatos lett. Ez a lebutított Flysky FS-i6 utánzat nem méltó ehhez a szuper géphez. Először is, a telemetria kihagyás teljesen indokolatlan, persze értem én az olcsósítási szándékot és a vezérlő sem tudja, na de egy eredeti táv 15, ez meg 12.000 Ft, szóval az a 3000 Ft-nyi spórolás nem áll arányban a funkció elvesztésével. Másrészt ha alulról megütjük a távot, akkor újra indul, ha letesszük a földre, kikapcsol. A mega kontakt hiba oka, hogy a távirányító gimbaljai hozzáérnek a trim gombok nyákjához és rövidzárba teszik azt. Ilyenkor mindig arra gondolok, hogy azzal aki ezt így tervezte meg, legszívesebben azt tenném, amit a fővilágosító tett a Trópusi Viharban a rendezővel. Maradjunk annyiban, hogy ezt a távot nem lehet hosszú "távon" (ehhe-ehhe) számításba venni, csakhogy, mivel a vevőket nem dobálnám ki (mivel van már 5), ezért most kicsit kellemetlen helyzetben kerültem. Így már nem csak a táv árát, hanem az új vevőket is ki kellene csengetnem. Gondolkodom a megoldáson, de addig is élvezzétek a képeket eme "remek" táv "fantasztikus" belső felépítéséről.