Építési napló 2, Stage 1.3 - Szopware
 Az utolsó, még kimaradt szekció az Ogre Mark II kapcsán a szoftveres beállítás. Azt ígértem anno, hogy különböző fejlesztési fázisokban megtudhatjátok, hogy a kamera platform hogyan állt össze. Erre sajnos mára meglehetősen kevés esély maradt, ugyanis olyan hibákat találtam az elkészült alapgépen, amely kétségessé teszi a folytatást, de erről majd később. Mivel senkit nem akarok cserben hagyni, ezért a NAZA-M Lite vezérlőt még felkonfiguráltam és repültem vele néhány tiszteletkört, hátha ez másoknak hasznára lesz.Általában azért szokták a DJI NAZA-M Lite vezérlőt választani az emberek, mert azt olvasták, hogy:
Az utolsó, még kimaradt szekció az Ogre Mark II kapcsán a szoftveres beállítás. Azt ígértem anno, hogy különböző fejlesztési fázisokban megtudhatjátok, hogy a kamera platform hogyan állt össze. Erre sajnos mára meglehetősen kevés esély maradt, ugyanis olyan hibákat találtam az elkészült alapgépen, amely kétségessé teszi a folytatást, de erről majd később. Mivel senkit nem akarok cserben hagyni, ezért a NAZA-M Lite vezérlőt még felkonfiguráltam és repültem vele néhány tiszteletkört, hátha ez másoknak hasznára lesz.Általában azért szokták a DJI NAZA-M Lite vezérlőt választani az emberek, mert azt olvasták, hogy:
- könnyű beállítani
- nagyon megbízható, mert DJI
- mert ez a legolcsóbb, bohóckodós vezérlő, de hát mégis ott van az a három betű, ami a multirotoros világban olyan, mint telefonoknál a sötétben világító alma logó
Én az első szempontot tartottam fontosnak, mert nem akartam túlkomplikálni a dolgokat, egy teljesen nulláról épített géphez jó lesz ez, főleg ha az elsőről (vagy az 1.5-ről) van szó. Ami viszont nem szokott elhangzani a vezérlő kapcsán, hogy az egyszerűséggel egy csomó kötöttség is együtt jár, amelyet így a beállítás után annyira már nem könnyű acceptálni. De sebaj, ott van a NAZA V2 szoftvere, amelyet fel lehet műteni a NAZA M Litera, ami egy remek fejlesztési lehetőség, bár én még ezt nem tettem meg, pedig az lenne a "határtalan lehetőségek" tárháza.
Az egyszerűség első két kötöttségét már akkor észre lehet venni, amikor kibontjuk a dobozból a vezérlőt. Az egyik, hogy a vezérlőn a csatornák elhelyezkedése és funkciója kötött. PWM bekötésnél, ahogyan én is csináltam, relatíve egyszerű a helyzet, mindent oda kell dugni, ahová a vezérlő csatornajele mutatja. Bár az előző cikkemben leírtam, melyik csatorna micsoda, azért újra ide vágom, az egyértelműség kedvéért:
- A: Aileron vagyis Roll
- E: Elevator vagyis Pitch
- T: Throttle vagyis gáz
- R: rudder vagyis Yaw
- U: módválasztó kapcsoló, GPS/Attitude/Failsafe stb. között
- X1: gimbal 1. csatorna
- X2: IOC választó csatorna, nem gimbal, ezt az előző cikkben rosszul írtam (csak a motor felöli oldalon van két gimbal csatorna, az F1 és az F2, ezt kötöttem össze egymással, fejben)
- X3: PMU modul, ami egyben VSEN is, vagyis feszültség figyelés, ezen keresztül működik a Low voltage cut (LVC) funkció


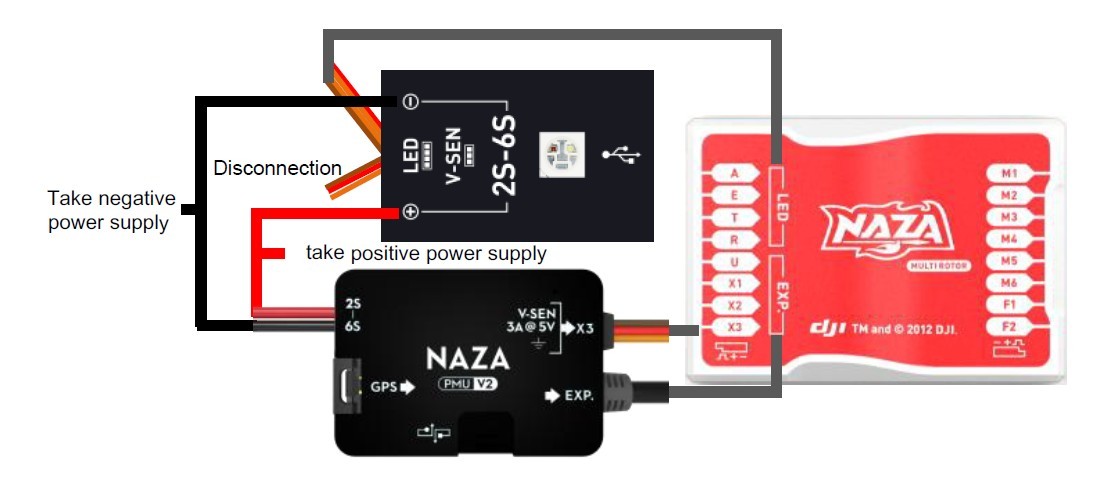
Ennyi, tehát nem lehet össze vissza dugdosni a dolgokat, mint egy CC3D vagy egy Naze 32 vezérlő esetében. Jól látható, hogy a 8. hely egyben a PMU modul helye is, vagyis innen kapja meg az 5V-ot a vezérlőnk, ami egy nem kicsi cuccos, tehát ha ezt is feltesszük a gépünkre, kapásból kapunk egy 20 grammos ballasztot az alapsúlyhoz (nem próbáltam betápolni a BEC részéről a PDB-nek, gondolom lehetne így is, de akkor mérjen már feszültséget is, ha már adták gyárilag). Marad tehát 7 csatornánk, amelyből az első 4 ugye a szokásos, repüléshez szükséges csatornák, marad tehát 3, amelyből az U a módválasztó, vagyis hogy GPS, Attitude vagy Manual módban akarunk-e repülni. Tehát erre is szükségünk van, marad az X1 és az X2 csatorna, na de mik is ezek? Az X1 egy gimbal csatorna, vagyis ide sem lehet csak úgy feldobálni dolgokat és mivel én hosszabb távon akartam gimbalt, ezért erre szükségem volt (lett volna). Az X2 az IOC (aka. Headless) csatorna, vagyis a gimbalt csak egy irányban lehet majd vezérelni, ez a le-fel irány (tilt), vagyis ez is egy kötöttség, nincs rá két dedikált vonal. Látható, hogy mivel minden csatorna szerepe adott, nem lehet össze-vissza kötögetni, majd menüből átállítani, ez ilyen és kész.
A vezérlőt egy Flysky FS-iA10 vevővel párosítottam, ami ugye 10 csatornás, csak éppen nem lett volna hol belevinni ezt a 10 csatornát PWM-en keresztül. Sikerült ugyanazt a láma hibát elkövetnem, amit már az FS-i6 esetében is, hogy nem az FS-iA6B vevőt, hanem az FS-iA6-ot vettem meg, ami NEM TUD PPM-et. Vagyis minden csatorna külön szervó kábel, Holly Molly. Szóval mindenki vegyen FS-iA10B vevőt, hogy egy szervó kábelen be tudjon vinni 8 csatornát, mert így akár még értelme is lesz a nagyobb vevőnek (nem beszélve a kevesebb kábelről).
Pro tipp 1: látszólag ellent mondok magamnak, hiszen az előbb FS-iA10B-t javasoltam, na de nincs is 10 csatorna igaz? Akkor miért ne használjunk Fs-ia6b-t iBUS-szal? Ugyanis e szerint a bejegyzés szerint megy 8 csatornával is és méretre is kisebb mint a 10B, yeah baby.
Ennek tükrében kezdtem el konfigurálni a vezérlőt, aminél nagyjából egy Naze32 szerű Cleanflightra számítottam, de sajnos csalódnom kellett, ehhez képest ez egy faék egyszerűségű valami. A csatornák kötöttsége már önmagában gond, aztán összesen 6 féle elrendezés típust (X4, plusz 4, Y3, fordított Y3, hexa előre és hexa normál) kezel, ez is ugye csak 3 elrendezés variánsa, tehát ezzel ne akarjunk pl. X8-at vagy Y6-ot építeni.
Nincs PID vezérlés, helyette egy kombinált GAIN értéket állítgathatunk a Pitch, a Roll, a Yaw tengelyre, illetve ezen kívül van vertikális (milyen gyorsan emelkedjen) és Attitude gain is, azon belül is kétféle.
Ami viszont tetszett, hogy alapból méri a feszültségértékeket a vezérlő, tehát ezzel a résszel annyira nem kell foglalkoznunk, ez alapján lehet beállítani a Low voltage reakciókat is, ez kellemes és egyszerű (ennek ellenére én azért a PDB oldalra is tettem egy csipogót, ami a boardra van gyárilag integrálva).
Ahogy már említettem, a gimbal vezérlés kissé korlátozott 1 tengely vezérlésével, how sad. No sebaj, meglátjuk, le lehet-e ezeket a rendkivül bosszantó hibákat küzdeni a Naza V2 firmware upgraddel.
És akkor most nézzük meg egy remek videóban, hogy mit hadováltam össze:
A sorozat további részei:




