Építési napló 2, Stage 1.1 - Carbon van a hold
 Véget ért az Ogre Mark I. projekt. Nem mondhatnám, hogy nagyon kiadta a gép, annak ellenére, hogy hardveresen nem volt gond, az alkatrészek minősége is elfogadható volt, illetve én is hozzátettem néhány apróbb dolgot, mint pl. a LED szalagok vagy a fa merevítés. A szoftveres résszel viszont nem igazán tudtam megbirkózni, aminek az oka egyrészt a türelem hiánya, másrészt az elképesztően jó idő volt. Sajnáltam volna egy mező közepén órákon át egy laptoppal az ölemben ülni és paramétereket állítgatni, "ó mily csodás teazsúr". Mire végre sikerült "valamennyire" belőni a PID-eket, addigra valami mágikus napkitörés eltörölte a beállításokat a vezérlőről, szóval nem volt nagy humorom újra előröl kezdeni az egészet. Persze ez nem azt jelenti, hogy sosem fogom megtenni, csak kell valami egyéb idegnyugtató tevékenység, amivel el lehet bíbelődni, szóval elkezdtem az Ogre Mark II. megépítését.
Véget ért az Ogre Mark I. projekt. Nem mondhatnám, hogy nagyon kiadta a gép, annak ellenére, hogy hardveresen nem volt gond, az alkatrészek minősége is elfogadható volt, illetve én is hozzátettem néhány apróbb dolgot, mint pl. a LED szalagok vagy a fa merevítés. A szoftveres résszel viszont nem igazán tudtam megbirkózni, aminek az oka egyrészt a türelem hiánya, másrészt az elképesztően jó idő volt. Sajnáltam volna egy mező közepén órákon át egy laptoppal az ölemben ülni és paramétereket állítgatni, "ó mily csodás teazsúr". Mire végre sikerült "valamennyire" belőni a PID-eket, addigra valami mágikus napkitörés eltörölte a beállításokat a vezérlőről, szóval nem volt nagy humorom újra előröl kezdeni az egészet. Persze ez nem azt jelenti, hogy sosem fogom megtenni, csak kell valami egyéb idegnyugtató tevékenység, amivel el lehet bíbelődni, szóval elkezdtem az Ogre Mark II. megépítését.
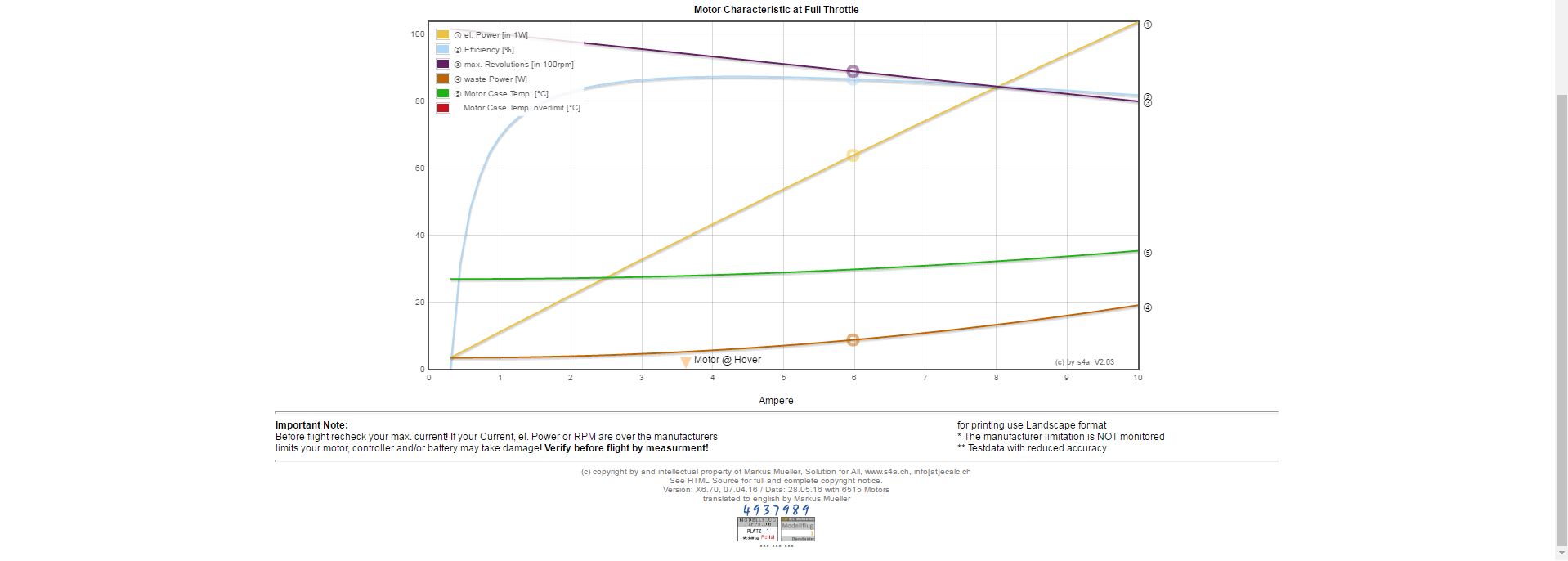
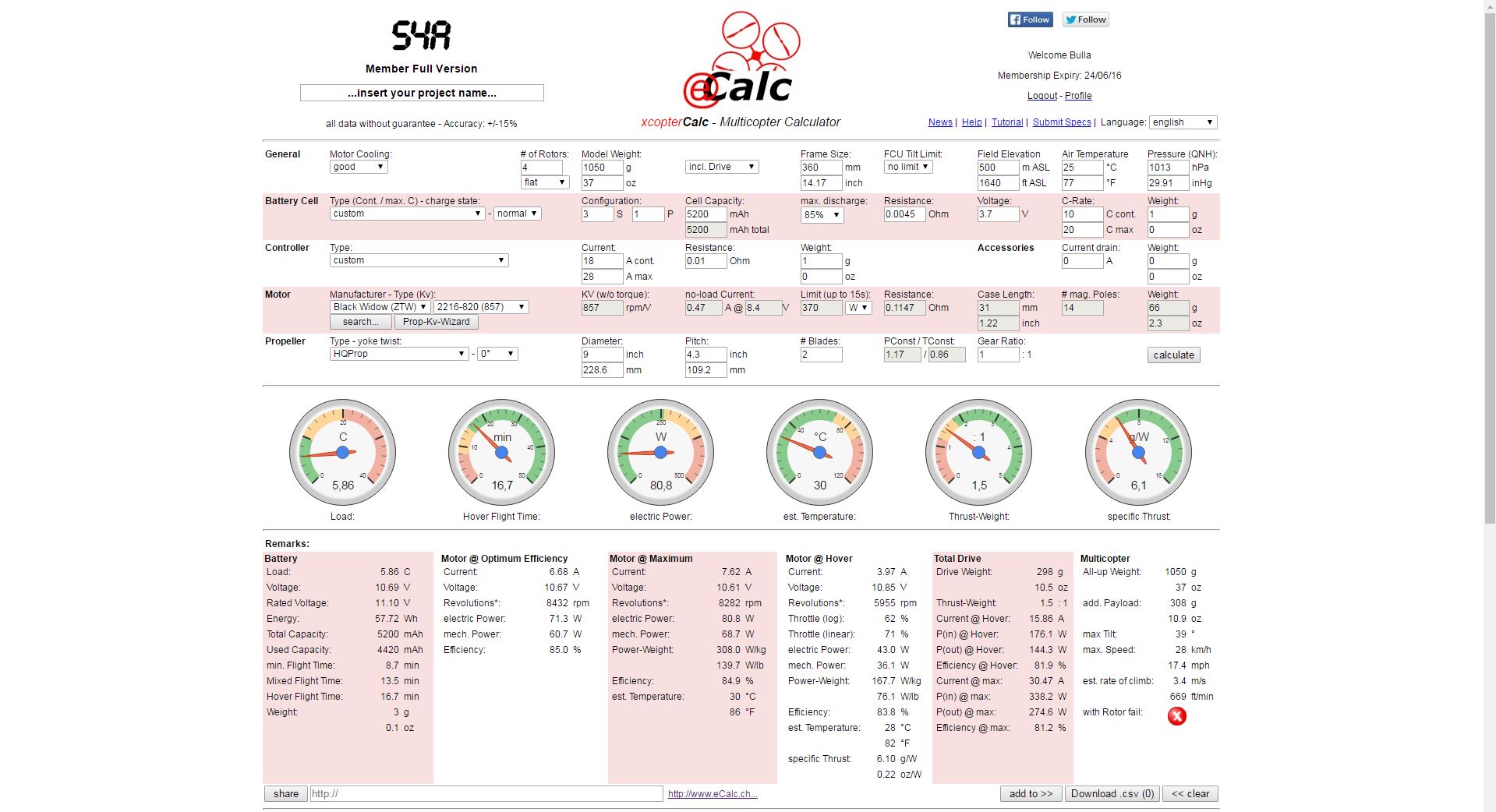
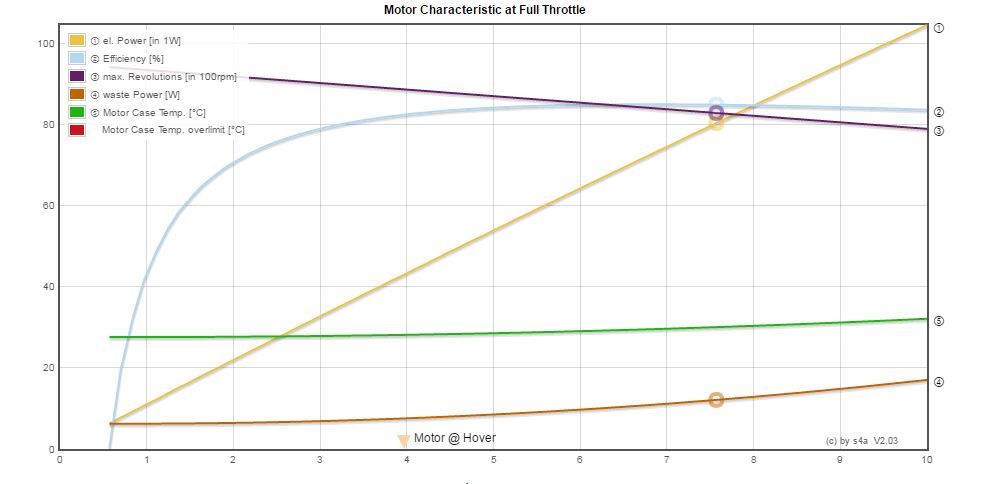
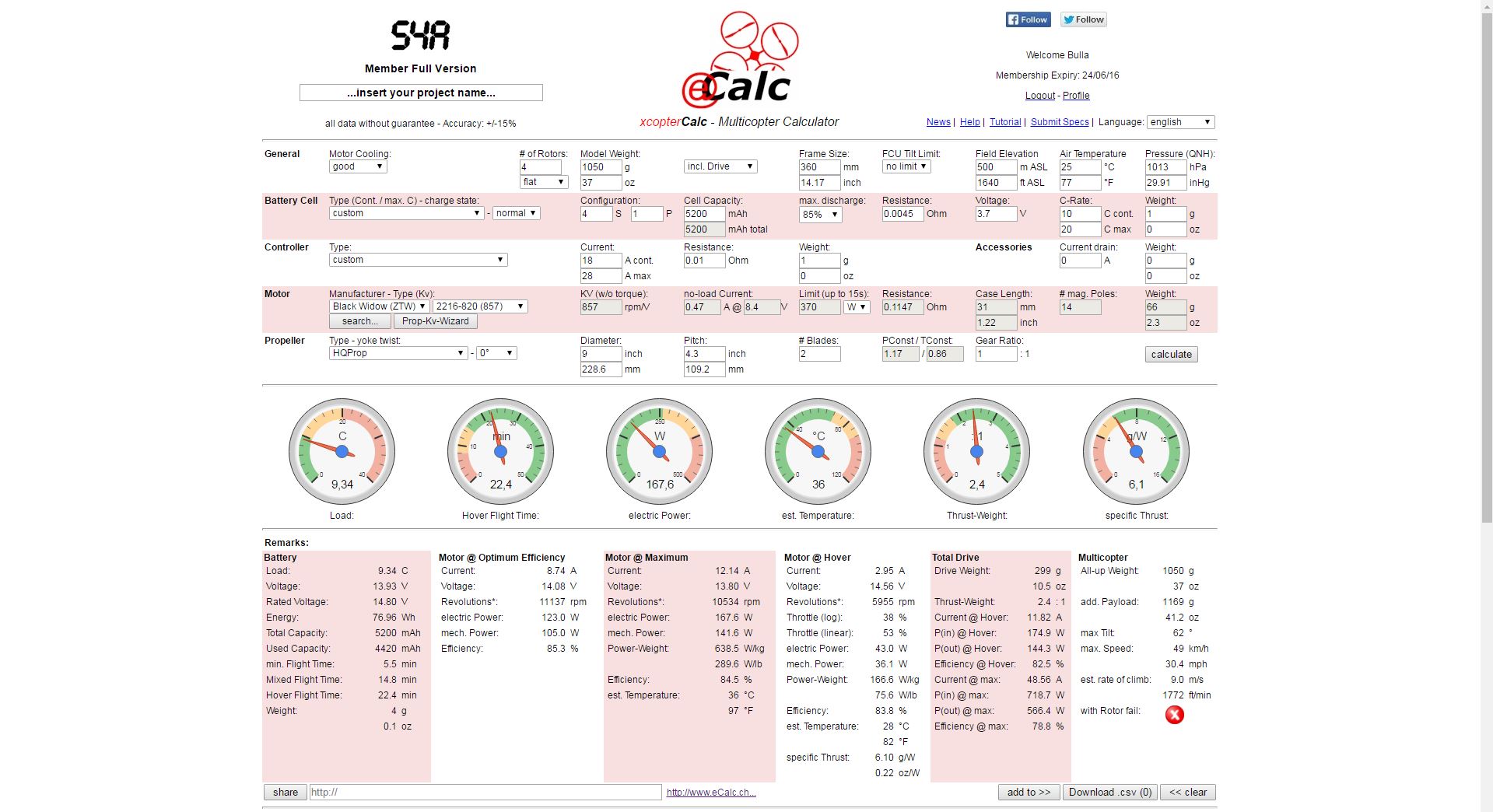
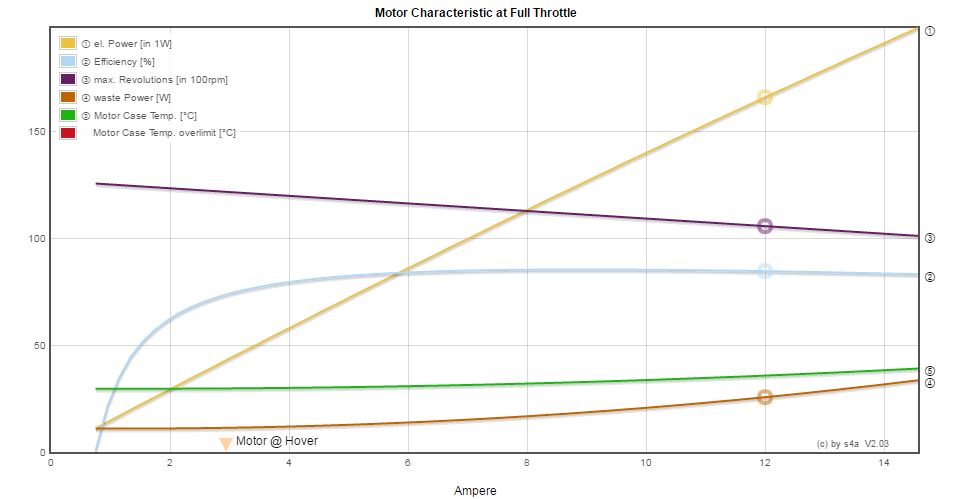
Gondolkodtam azon, hogy le kellene vonni az első projektből a nagy tanulságokat, hogy milyen hibákat követtem el bla.bla. és akkor mindenki gondolja ide az összes közhelyet amit ilyenkor szoktak az emberek mondani, megspékelve egy Coelho idézettel. Sajnos nem szállt meg az isteni ihlet és nem lettem elektromérnök sem egy drón összeépítésétől, szóval csak nagyon egyszerű alapigazságok fognak elhangzani. Az egyik ilyen a tervezési fázishoz tartozik, illetve annak hiányához, ugyanis ezt teljesen kihagytam az első projekt esetében. Ilyet viszont nem szabad csinálni, mert az esetek nagy részében nem ez az eredményes út. Ráadásul nem is olyan régen körbenyaltam az Xcopter Calc programot, akkor használjuk már élesben is, tehát szépen meg is terveztem az egészet és íme az eredmény /az első két kép az Ogre Mark I, míg a következő 4 az Ogre Mark II 3S illetve 4S eredményei/

Ami azért a nagy elmélkedésben kiderült, hogy a Mark I. bizonyos területeken kihívásokkal küszködik, ilyen pl. a kameraplatformitás teljes hiánya, ami egy kameraplatformnál erőteljesen kontraindikált (asszem ebben a mondatban 3 képzavar is van). Vagyis az egyik cél az volt, hogy valamiféle szoftveres multifunkcionalitást és erőteljesebb stabilitást csempésszünk a projektbe. Mi lehetne jobb példa előttünk, mint egy DJI Phantom? Na nem egy nagyon új, mondjuk egy 1-es, esetleg egy 2-es szintje, amit el kellene érni és amivel már elégedett lennék. Éppen ezért és a fölösleges állítgatást elkerülendő, az alkatrészek nagy részének mennie kellett.
Ami a stabilitást illeti, több dologhoz is hozzá kellett nyúlni. Nagyobb propellerméret, nagyobb stabilitás. Kisebb súly, hosszabb üzemidő. Hatékonyabb és lassabban forgó motor kevesebb rezgést ad át a vázra, szóval kezdjük a motor lecserélésével, amely egyébként a legnehezebb feladat volt. Mielőtt azonban belemennénk a motor témába, leírom az alkatrészeket, mind a két verzióra, árakkal együtt, hogy legyen mindenkinek összehasonlítási alapja.
ALKATRÉSZLISTA (szerszámokat és egyéb anyagokat nem számolva)
| ALKATRÉSZ | MARK I. | ÁR | MARK II. | ÁR |
| Váz | DJI F330 replika | 2901 | X4 Alien 360mm | 5904 |
| Talp | DJI landing skid | 780 | DJI Tripod | 769 |
| Leszállótappancsok (4 db) | Walkera Tali | 376 | Bohócorr :D | 558 |
| Akkumulátor (Battery) | Multistar 4000mAh 3S | 5000 | Multistar 5200 4S | 11022 |
| Feszültségjelző (Buzzer) | 2X2 in 1 Lipo Battery LVT | 1100 | 2x2 in Lipo Battery | 1100 |
| Vevő (Receiver) | Flysky FS-A6 | 2835 | Flysky FS-i10 | 5013 |
| Repülésvezérlő (FC) | Naze 32 Full 10DOF | 7376 | NAZA-M Lite | 18388 |
| Sebességszabályzó (ESC) | Emax 4 in 1 25A | 8316 | ZTW Black Widow | 0 |
| LED (2 db) | 1M 5050 SMD 60LED | 2032 | 1M 5050 SMD LED | 2032 |
| Motor (4 db) | DYS BX2212 920KV | 13260 | ZTW 2216 820KV | 14592 |
| Propeller (4 db) | Gemfan 8045 | 1214 | DJI 9045 self-lock ? | 1913 |
| GPS | NINCS | 0 | Ublox M8N GPS | 8357 |
| Távirányító | Emax Nh. EM-16 | 0 | Flysky FS-i6 | 13239 |
| ÖSSZES KÖLTSÉG | 45190 Ft | 82887 Ft |

Mint látható, a költségvetés a duplájára ugrott - FPV, gimbal és kamera nélkül - és összesen két alkatrészt tartottam meg, a LED csíkokat és a csipogót, vagyis nagyjából semmit. Na de kanyarodjunk vissza egy picit a motorra, illetve annak cseréjére. Az előző motorok - DYS BX 2212 920KV - teljesen jók lettek volna erre a méretre is, de én szerettem volna egy lassabban forgó motort és egy nagyobb propellert használni. Mivel a vázméret növekedése +1 inchet biztosan lehetővé tesz (de lehet hogy +2-t), illetve az akkumulátor cellaszámát is meg akartam növelni 3S-ről 4S-re, ezért össze kellett vetni a jövőbeni teljesítményt a motorok tűrőképességével. Bár a DYS-hez a gyártó 2-5S-t ad meg, míg a ZTW a Black Widowhoz csak 2-4S-t, a maximális teljesítményfelvétele ez utóbbinak jobb, 318 a 370W-tal szemben. A másik fontos szempont a súlycsökkentés volt, ezért ezt a paramétert is összevetettem. A DYS esetében ez 80 gramm, míg a Black Widow esetében csak 65,5, de ESC-VEL ! együtt. Az első modell esetében 4 in 1 kombinált ESC súlyát kellene elosztanunk, ez 130 gramm, vagyis a motorra vetített ESC súlya 32,5 gramm, vagyis a tényleges különbség 47 gramm motoronként !, ennyit nyerünk a meghajtás cseréjével. Sajnos a teljesítményadatokat nem találtam meg, de azt gondolom, nem lehet sokkal gyengébb, mint a DYS, illetve a propeller és a cellaszám is nagyobb, vagyis a gép biztosan erősebb lesz. Árban pedig még olcsóbb is, hiszen ez egy 2 in 1 megoldás, máskor ennyi szokott lenni csak az ESC, szóval a motor tulajdonképpen ingyen volt.


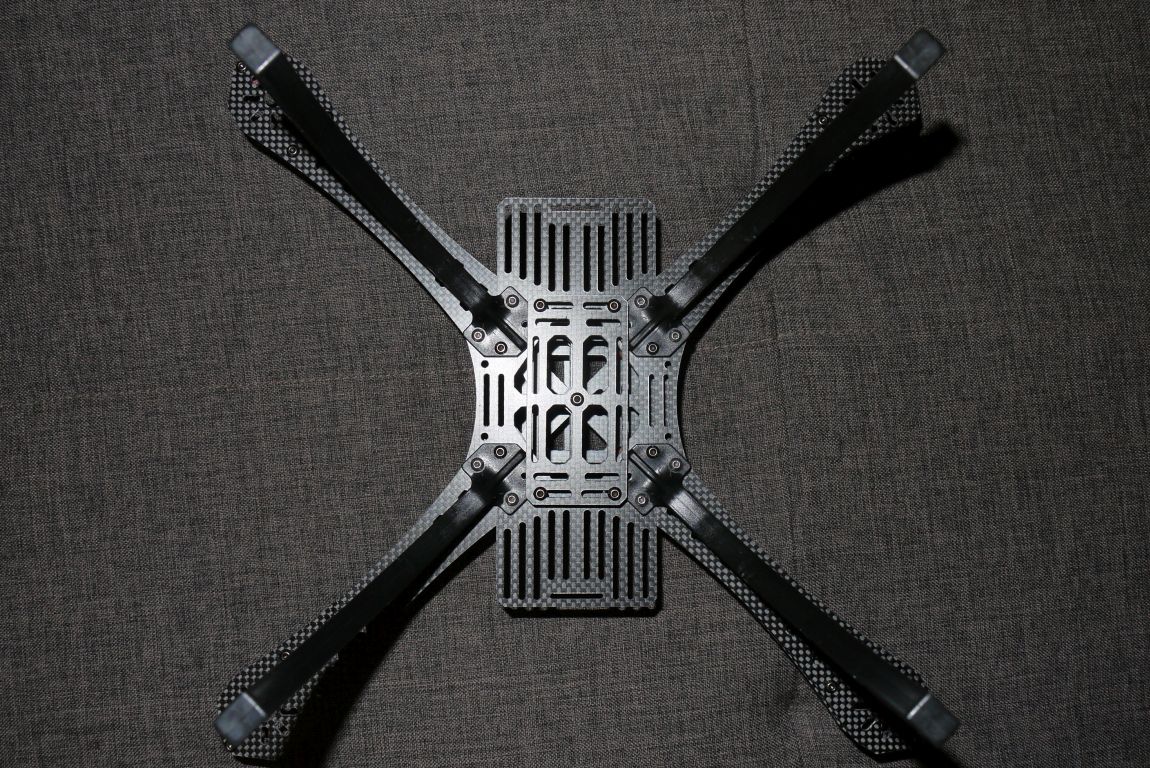


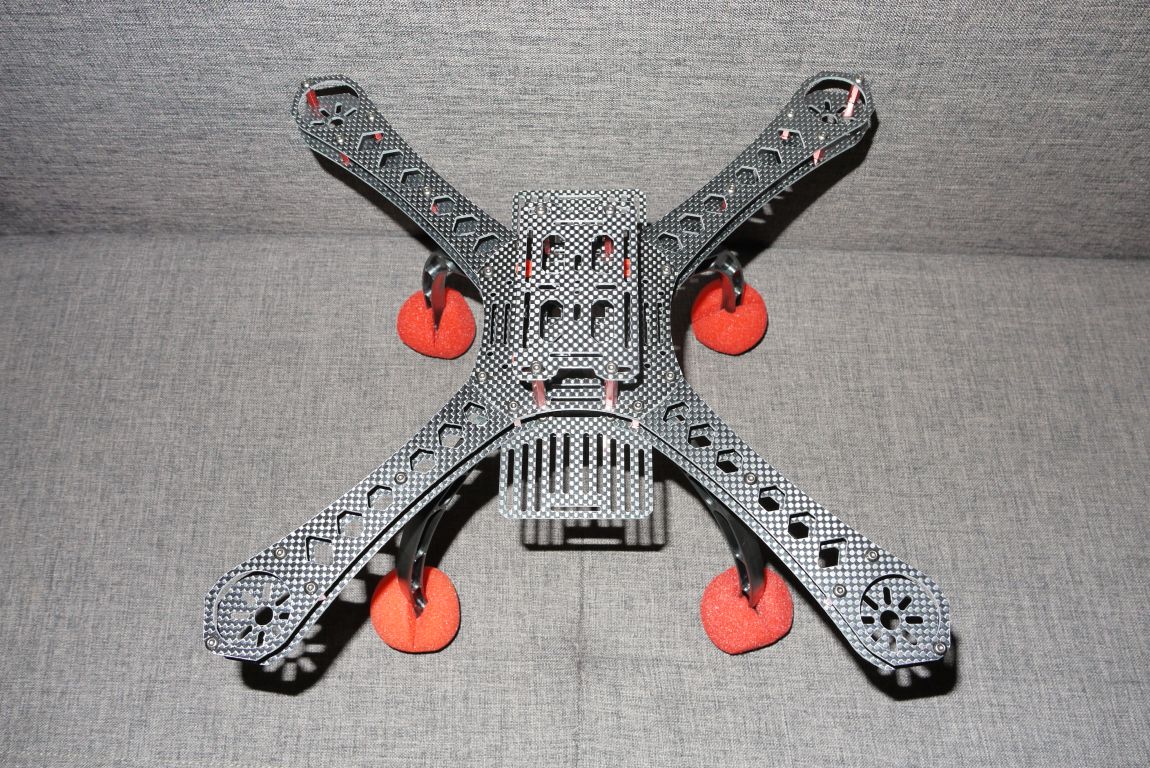
A váznak már szenteltem egy teljes cikket, a "Váz, motor és átverés"-t, a lényeg az, hogy a full karbon váz (kivéve a leszállótalpak) lényegesen könnyebb, mint az előző volt, cserébe viszont jóval erősebb. A szendvics szerkezetben pedig el lehet rejteni a kábelezést, ezért a clean build szerelmeseinek is meg tudok majd felelni. Viszont azt se felejtsük el, hogy ez nem egy kevert, műanyag-fa váz, hanem karbon, ami vezeti az áramot, ezért az alkatrészeket fel kell bakolni, ehhez távtartókat kell vennünk (nylon spacer angolul), én egy 300 db-osat szerváltam be.
A PDB kapcsán sem tudtam igazán döntést hozni. Az előző váz esetében a középső dekkre volt integrálva, tehát azzal kapcsolatban nem volt tapasztalatom, hogy milyen különállót kellene venni. Nem tudtam, mekkora fér be a vázba, illetve hogy mekkora áramtűréssel kellene rendelkeznie (minimum 80A), szóval vettem egyből kettőt. Ha mind a kettő beválik, majd elhasználom egy másik projekt keretében. Fontos szempont volt, hogy legyen rajta 5 és 12V-os feszültségregulátor, a 12V a ledeknek, az 5V pedig mindennek, ami annyit igényel. A két választott: Matek Micro PDB és a Lantian mini PDB.
A vezérlőnek mennie kellett. Nem azért, mert a Naze 32 10DOF (degree of freedom, vagyis, hogy milyen szenzorokat kap a vezérlő, 3 accelero, 3 giro, 3 magnetometer, 1 barometer) rossz lenne, csak az egy versenygép vezérlője és most szerettem volna valami olyat, ami kameraplatformosabb és nem akartam az állítgatás tömör gyönyörét újra magamra vállalni (helyette még egy megtanulandó vezérlőszoftver a Libreoffice, Cleanflight, Baseflight mellett:D). Ebben viszont a DJI vitathatatlanul király, ezért megvettem a kisebb vezérlőjüket. Miért nem vettem meg a NAZA M V2-t kétszer ennyiért? Nos, azért mert a Lite szoftveresen felokosítható, egy V2 szintjére, de erről majd egy másik cikkben. A NAZA ráadásul kezel GPS-t is, így nem kell a barometrikus szenzor biztosította lebegésre hagyatkoznom, ami nem nagyon működött a Naze32 esetében, hanem csak szépen átcuppantom GPS Lock módba a gépet és szevasz. Mivel a 6 csatorna, amit használtam - thrust, roll, pitch, yaw + mód választó + Fail Safe - kevés lesz egy gimballal rendelkező, kamerás géphez, kellett még néhány csatorna. Okulva a racerek kamikaze akciójából - amikor is a gép a kiszabaduló vevőkábelt levágta saját magáról - csak két antennás vevő jöhetett szóba, ezért a Flysky FS-iA10-re esett a választás. Ehhez viszont kellett volna egy 10 csatornás távirányító, ami nagyjából 40-50.000 Ft-tal nyomta volna meg a költségeket. Ezért úgy döntöttem, hogy beruházok egy Flysky FS-i6-ra, ami - és most jön a varázslat - felokosítható 10 csatornára. A NAZA és a Flyskyos trükkel egy tollvonással nyertünk kb. 50-70.000 Ft-ot, ami igen szép summa (aztán ha nem működik, verem majd a fejemet a falba).




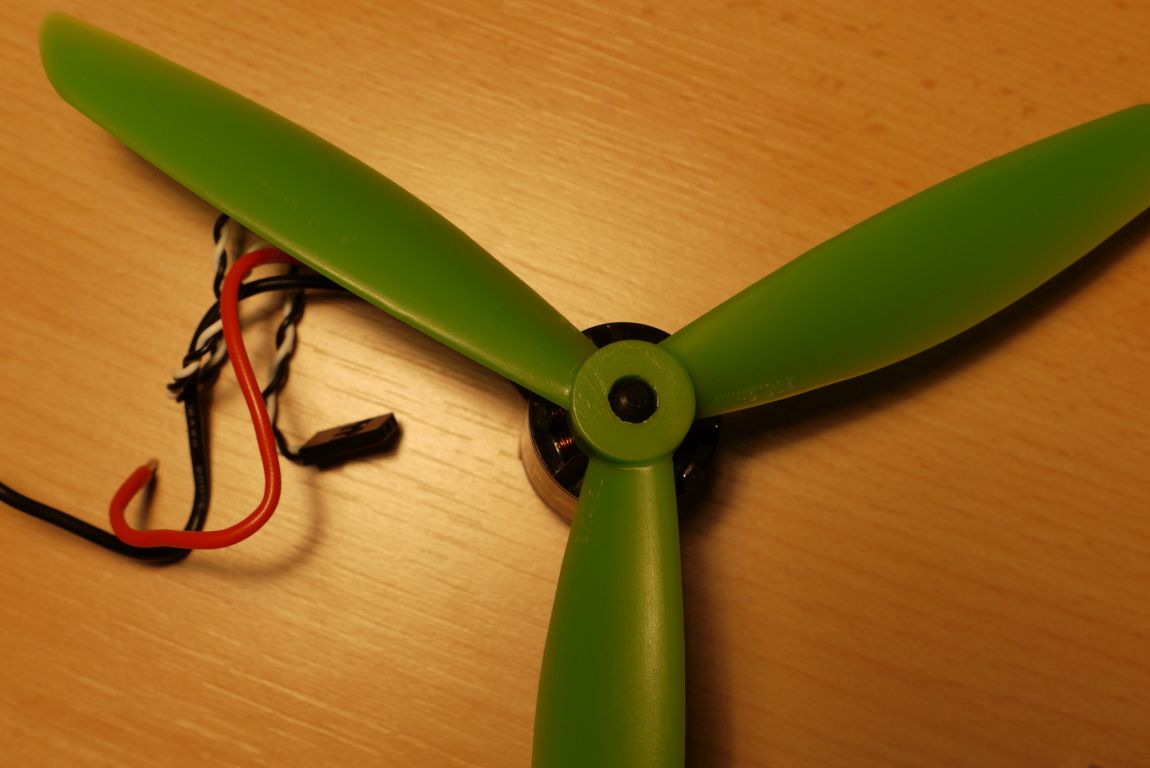
Ami a propellert illeti, ez egy picikét trükkös fejezet. A nagyobb felületű propeller stabilabb repülést és nagyobb erőt (vagy kisebb fordulaton azonos erőt és kisebb fogyasztást) tesz lehetővé. A nagyobb szögállás nagyobb erőt és nagyobb fogyasztást. Nekem az lett volna az ideális, ha nagyobb felületű, kisebb szögállású propellerrel tudok repülni, kevesebb rezgés mellett, tehát 9045-1045-ös propellerekben gondolkodtam, de a kisebb szögállást is díjaztam volna. Sajnos azonban elrontottam a propeller rendelést, de ide írom, hogy ti ne legyetek ilyen figyelmetlenek, mint én:
- Gemfan GF sorozat, ezek repülőgép propellerek, onnan lehet tudni, hogy NINCS cw és ccw irányú, csak egyféle, ezeket NEM SZABAD megvenni a ZTW Black Spider motorokhoz
- ABS 8045x3 Leaf, ezeket SZINTÉN NEM SZABAD megvenni a ZTW Black Spider motorokhoz, mert rövid a motortengely
- Mit szabad megvenni? Nem tudom, egyelőre én is keresem, az alkatrészek beérkezéséig, de a motor 5mm átmérőjű, menetes, rövid tengelyes (ha megvan, megírom, valószínűleg a DJI 9450 jó rá)
- Szerk.2016.06.09: a DJI 9450 sem jó, mert M6-os a belső átmérő, szóval írtam az rcgroupsnak, hogy melyik propeller lenne a jó (más is ezzel szenved), úgy néz ki, hogy Graupner 1045-ösben van 6 mm vékony Thin edition, illetve a Hobbykingen is árulnak egy Thin E-prop nevű propellert, szóval egyelőre marad a kísérletezés









Az akkumulátor mindig kardinális kérdés, mert függ tőle az üzemidő, a teljesítmény és a súly. A cellaszám növelése szinte mindig fordítottan arányos a súllyal, azonos kapacitás mellett, tehát egy 5200 mAh 3S akksi szinte mindig könnyebb mint egy 5200mAh 4S, cserébe ez utóbbi magasabb feszültséget ad ki, ezért a gép erősebb lesz. Ami viszont nekünk most sokkal fontosabb, az a feszültség érték, hiszen ha nem teljesítményt akarunk kivenni, hanem feszültséget - és ezáltal üzemidőt akarunk növelni - akkor a magasabb cellaszám a jobb. Relatíve egyszerű matematikával belátható, miért repül egy magasabb cellaszámú akkumulátorral a gép tovább:
- a repülést itt a lebegéssel kell azonosítanunk, hiszen a legtöbbször a kamera platformok lebegnek, majd úgy forogva vesznek fel videót, tehát a lebegési áramfelvételt kell alaphelyzetnek tekinteni
- a Lipo akkumulátorok cellafeszültsége 3.7V, maximumra feltöltve 4.2V, vagyis 3S-nél 12.6V, 4S-nél 16.8V
- ha a lebegési áramfelvétel 4 amper (tegyük fel, de lehetne bármennyi), akkor ez a 12,6V esetén 31,7%, míg 4S-nél 23,8% , vagyis az a pont, ahol elérjük a számunkra optimális teljesítményt, kevesebb energiát igényel (a fenti képeken a grafikonokat nézegetve ez kiolvasható). Ebből persze le kell vonni a 4S akkumulátor többletsúlyát, de még így is jó néhány percet nyerhetünk vele
Ami a leadható áramot illeti, 5200*20=104A áll rendelkezésünkre, ezt ha elosztjuk néggyel, akkor 26A-t kapunk. Mivel az ESC-k maximális áramfelvétele 28A lehet, ez a két szám pont passzol egymáshoz, bár igazság szerint egy picit alultervezett (persze nem kell halálra gyilkolni sem az akkumulátort, sem a motorokat, mert mind a kettő károsodhat). Miért nem vettem nagyobb C értékű akkumulátort? Mert nagyobb a súlya és sokkal drágább lett volna, vagyis több pénz elköltése mellett sem lett volna hatékonyabb (csak sokkal több pénz elköltése mellett:D).
A másik fontos dolog, hogy nem akarom a gépet egy lendülettel megépíteni, annak bonyolultsága és magas költsége miatt. Ahogyan azt már fent is láttátok, 80.000 Ft fölött van az alapgép költsége, ha erre rászámolom az egyéb bizbaszokat, szerszámokat, nyugodtan felkerekíthetjük 90.000 Ft-ra, erre jön rá a kamera (SJCAM SJ5000 X ELITE-35.000 Ft), A gimbal (egyelőre nem eldöntött, de valami könnyű, 3 axis gimbal lesz rajta 30-40.000 körül), az FPV szett (ez sem eldöntött, 20.000 körül) vagyis lesz még minimum 85.000 FT plusz költségem, de ebből már az SJCAM megvan, tehát ekkora költséget már nem kell ráfordítanom a projektre.
Vettem az Ebayen egy mechanikus kamerarögzítőt( a trolloknak: nem a kamerát veszi fel kívülről:D) és gimbalt (persze ez utóbbinak ez csak nagy jóindulattal nevezhető:D), hogy legalább nagyjából legyen fogalmam arról, hogy hogyan kell majd felfogatni, illetve milyen mélységre lesz szükség (elég magas-e a láb), ha gimbalt és kamerát is kell hordoznia a gépnek. Bár ez nem szerepel a költségtáblázatban, de ha esetleg valaki rákapna, akkor 2600 Ft-al kell számolnia és az alábbi, tökéletesen megjegyezhetetlen néven kell keresnie: F10043 Carbon Fiber Camera Gimbal.
Mint látható, a képrögzítésért és megjelenítésért felelős eszközök megduplázzák a projektre fordítandó költségeket, így lassan el is érjük egy Phantom 3 Standard árát (nyilvánvaló volt, hogy nem lehet olcsóbban kijönni).
Összefoglalva a fentieket, az építést Stage-ekre fogom bontani, ezekről szépen be fogok számolni egyenként. Fogjuk fel ezt egyfajta ütemtervként, amin végig kell haladni, hogy elkészüljön a végleges gép. Szóval most a Stage 1/1-es bejegyzést olvassátok és aki be akar segíteni ötletekkel, azok kérem, hogy írjanak az alsó kommentmezőbe.
Stagek:
- Stage 1: tervezés, alkatrészek megvásárlása
- Stage 2: a gép megépítése, repülőképes állapotra hozás
- Stage 3: szoftveres beállítás és paraméterezés
- Stage 4: kamera, gimbal és FPV alkatrészek beszerzése, beszerelése és beállítása (plusz költségek)
- Stage 5: kibontok egy sört és miközben megiszom, nézem, mennyire királyul néz ki a cucc:D
Elöljáróban ennyit szerettem volna elmondani, kérem kapcsolja ki.




