Építési napló 1.2 - Kész az Ogre Mark I.

FRISSÍTVE: 2016.07.06: mert nem tudok helyesen írni és fogalmazni:D
Igen, végre elkezdődött, tudom hogy hihetetlen, de belevágtam, mert már nem tudtam több alibi cikket írni végre tudtam időt szakítani az építésre. Ez az oly távoli pillanat most még is eljött, elkezdjük az Ogre Mark I. építését és lehet, hogy belekóstolunk az Ogre Mark II. terveibe is egy kicsit. A két projekt között csak annyi a különbség, hogy míg az első esetében a már meglévő alkatrészeket fogjuk szépen elhelyezgetni, addig a Mark II.-höz újakat is kell vásárolunk, ezeket viszont előtte át kell néznünk, hogy lássuk az esetlegesen felmerülő problémákat.
Igazából mikor elkezdtem írni azt a cikket, akkor még úgy voltam vele, hogy áhh, úgy sem készül el záros határidőn belül a gép, szóval lehet majd itt komplett cikksorozatot írni az építésről. De aztán a Pünkösd elég időt biztosított arra, hogy készre szereljük a gépet. Ez rávilágított arra, hogy nem is olyan bonyolult dolog ez, hogy ha az embernek már megvannak az alkatrészei, hiszen itt tulajdonképpen egy szétszedés-összerakásról és nem pedig egy teljesen új építésről van szó. Aki esetleg nem követte volna a projektet - de persze ilyen nincsen :D - annak ideszúrom az előző cikkeket:
- Leépítési napló 1.1 - az első lépés a szétszedés
- Váz, motor és átverés - ne fizessünk többet annál, mint amennyit valami ér
Persze volt olyan élelmes olvasó, aki jelezte, ez nem is a Mark I. verzió, hiszen a szétszedés előtt is volt már egy készre szerelt gép, ebben teljesen igaza van, de azt nem én építettem, szóval vegyük úgy, hogy az volt a prototípus. Az új időszámítás pedig akkor kezdődött el, amikor saját kezűleg nyúltam a géphez, szóval tekintsünk el a filológiai pontatlanságok ilyetén való felemlegetésétől.
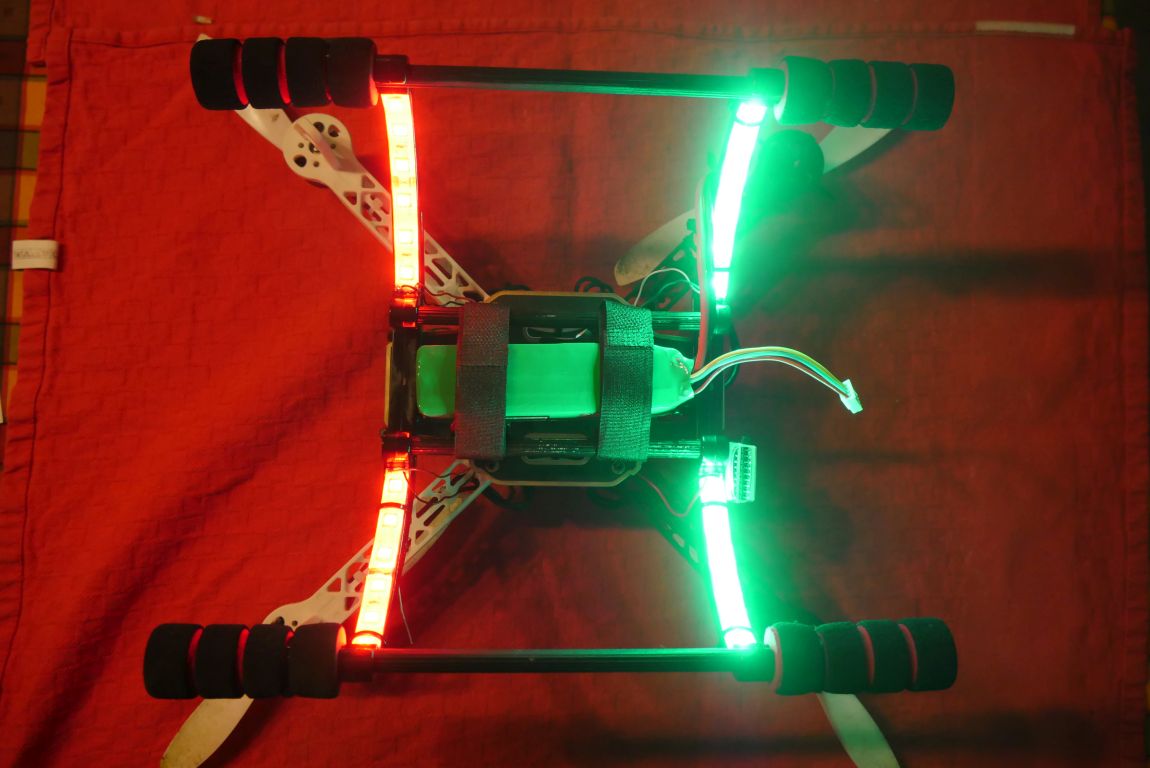
Most hogy majdnem mindent sikerült felhalmozni, kezdődhetett a móka. Mivel a gép teljesen szét volt szedve, ezért érdemes volt alulról felfele építkezni, így levettük a felépítményt és a középső vázelemre - ami itt egyben a PDB is - felforrasztottuk az XT60-as betápot és a 4 db LED-et. Az XT-60-a csatlakozó azonban nem maradt a PDB-n, hanem oldalra kirögzítettük a leszállólábra, hogy könnyebb legyen az akkumulátort rádugni. Itt jött az első meglepetés, mert a zöld ledeket, amelyek a DJI színezés szerint hátulra kerültek, gond nélkül be tudtuk forrasztani a helyére, ellenben a pirossal, ami nem nagyon akart kigyulladni, hiába adtam rá a tápot. Az általunk használt ledről annyit kell tudni, hogy egy olyan szalagra vannak felforrasztva, amely 3 ledenként vágható (ilyen sűrűn ismétlik az ellenállásokat). A lényeg az, hogy a piros ledszalagon bárhol mértük a feszültséget, az bizony ott volt, még sem égett a led. No, semmi baj, cseréljük fel a pozitív és a negatív oldalt és hopp, máris jó lett, viszont így egy picit összekuszáltuk a kábelezést. Szóval annyira azért ne bízzunk abban, hogy a kínai rizsföldön gyártott ledszalagokon minden jelölés jó lesz. A led egyébként remekül világít, jó erős a fénye és a levegőben is látszik, mindenkinek ajánlom, akit érdekel, az itt megtalálja:
Nagyjából az 1/3-madát használtuk el az Ogre első verziójára, vagyis az 1000 Ft-os vételárért sok gépre elég szalagot kapunk. A ledszalag rögzítésére két dolgot használtam, kétoldalú ragasztót és színben megfelelő gyorskötözőt, hiszen a divatra is figyelni kell. Nagyjából minden alkatrész így került felhelyezésre, így később is eltávolítható marad, két gyors nyisszantás után.



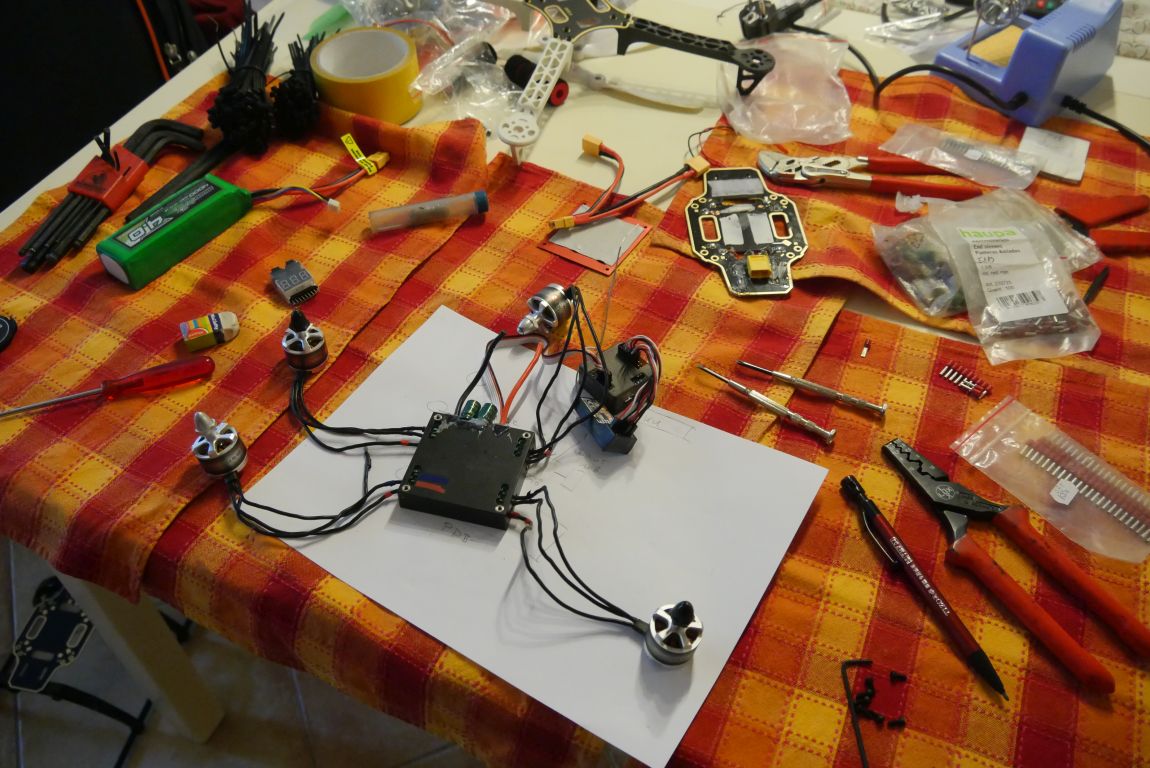
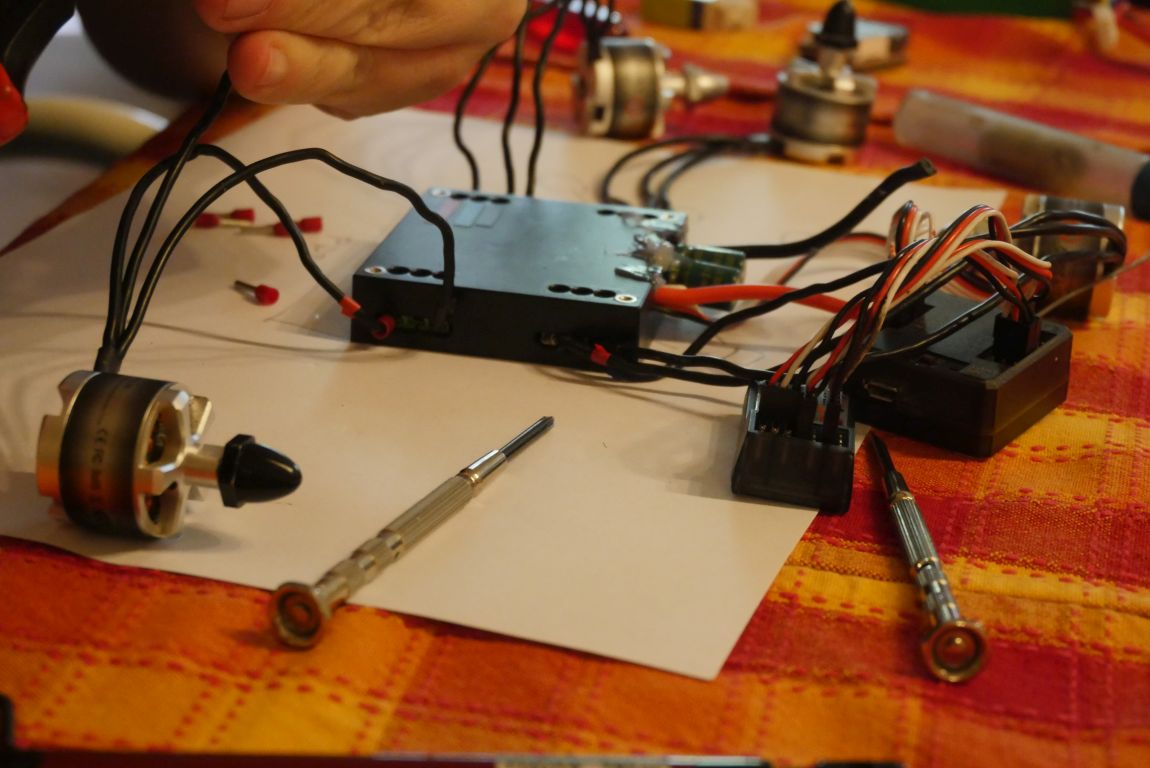
A következő feladat az volt, hogy elhelyezzük az alábbi elemeket a középső dekken:
- Flysky FS-A6 vevő (ilyet NE VEGYETEK, a magyarázatot lejjebb olvashatjátok)
- Naze 32 10DOF vezérlő
- Emax 25A 4 in 1 ESC
Mivel a hely viszonylag adott, ezért az eredeti felállást alkalmaztuk mi is, a középső dekkre (a PDB-re) került a vezérlő és a vevő, míg az ESC teljesen felülre, a felső dekkre. A vevő és a vezérlő szépen fel is feküdt a PDB-re, megkapták a maguk kis ragasztócsíkját, illetve a testükön áthúzott gyorsszorítókat, ám az ESC nem fért el a csavaroktól, ezért nem lehetett síkban felszerelni a felső lemezre. Mivel a motorok néhány kábelét kihúztam a 4 in 1 ESCből (csavarok szorítják be a motorkábeleket a helyükre és nem forrasztás rögzíti), ezért úgy döntöttünk édesapámmal (igen, ő a műszaki javítóbrigád és tanácsadó egy személyben, villamosmérnökként) hogy a kábeleket érvéghüvellyel látjuk el. Ez azért fontos, mert amikor az ESC szorítópofái közé be akarjuk nyomni a kábelt, az állandóan elakad és a sodrott erek szétjönnek, nem mennek elég mélyre, ezért nem lesz jó a kontaktus. Mivel az érvéghüvely az érvégfogóval való roppantás után atomstabil és merev lesz, ezért sokkal könnyebb az ESC-ben elhelyezni, másrészt jobban is érintkezik, mert szebben felfekszik a pofákra az ellapított anyag.






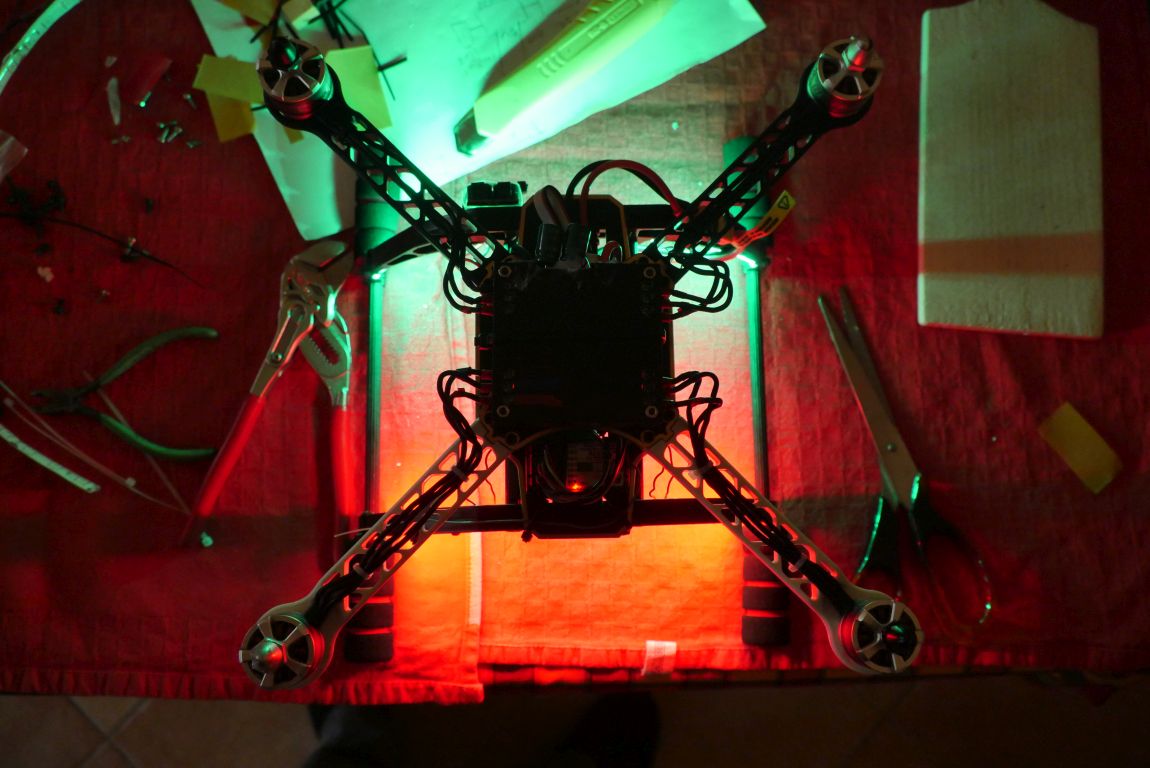
Visszakanyarodva a fordulatszámszabályzó elhelyezésére, meg kellett emelnünk az alját ahhoz, hogy ne érjen hozzá a csavarokhoz (ez egyébként eredetileg is így volt). Ehhez Pattex kétoldalú ragasztót használtunk, ennek a teherbírása 120KG, ez vélhetően elég lesz arra, hogy ne mozduljon el az ESC a helyéről. Aki ilyet keresne az interneten, az a "Pattex montázsszalag" vagy a "double sided mounting tape" név alatt fogja megtalálni. Ebből használtunk 4 réteget, így képezve egy puha, rezgéscsillapító felületet és egy magasított részt, ezzel a csavarok fölé emelve az ESC-t. Mind a három elem (ESC, vevő, FC) megkapta a gyorsszorítókat, majd felcsavaroztuk a motorokat. Itt jegyezném meg, hogy a DJI F330 másolat vázon természetesen rossz helyen vannak a furatok, ezért a motorok nem rögzíthetőek 4 csavarral, csak kettővel (bár annyira meg lehet húzni őket, hogy 1 csavarral sem esnek le), ez egyébként elég tipikus a kínai, utángyártott termékeknél, szóval akit ez zavar, az ne vegyen ilyen vázat. A kábeleket a színben megfelelő gyorsszorítóval lefogattam a karokra, illetve ahol szükséges volt, ott elhajtottam a kábeleket és újra lefogattam őket, nehogy beleérjenek a propellerek forgáskörébe.
Ezzel lényegében a gép repülésképessé vállt, már csak egy két apróság volt hátra. A vevő antennáját a lábra fogattam le, hogy minél távolabb legyen mindenféle elektromos forgótesttől, illetve a lefele irány esetén sosincs takarásban a távirányítóhoz képest. Itt hívnám fel a figyelmet arra, ami NAGYON FONTOS, ha multikoptert épít valaki. Amikor a vevő és az antenna a gépre kerül, mindenképpen teszteljük le, hogy működik-e a gépen a Fail Safe funkció.
A Fail Safe funkció lényege, hogy ha megszakad a távval a kapcsolat, mert pl. lemerül az elem, kikerülünk a hatótávból, stb. akkor a motor fordulatszámát a repülésvezérlő egy predeterminált értékre veszi vissza. Így ha full gáznál veszítjük el a jelet, akkor sem repül el a gép, hanem visszaveszi a fordulatot minimumra és leszáll (igazából persze leesik). Ezt úgy tudjuk kipróbálni, hogy propellerek nélkül beindítjuk a gépet, a távirányítón felnyomjuk maximumra a gázt, majd kikapcsoljuk a távot. Ha rövid időn belül nem esik le a fordulatszáma a motoroknak, akkor NINCSEN Fail Safe. Sajnos nálam is hasonló volt a helyzet, én arra gyanakszom, hogy a hibás a Flsyky FS-A6 vevő. Amikor lekapcsolom a távot, nagyon lassan esik le a fordulatszám, illetve az egyik motor maximum fordulatszámon tovább pörög. Ezért az FS-A6 helyett inkább a Flysky FS-iA6B vevőt válasszuk. Ez alapból két antennával rendelkezik, tehát két irányba kihozható a gép két különböző pontjára és jó eséllyel jól működik benne a Fail Safe (még nem próbáltam ki én sem, de a következő gépemen ilyen lesz). Meg fogom nézni szoftveresen is, hogy esetleg nem szoftveres beállítási hiba-e és frissítem a cikket, hogy ha van eredmény.
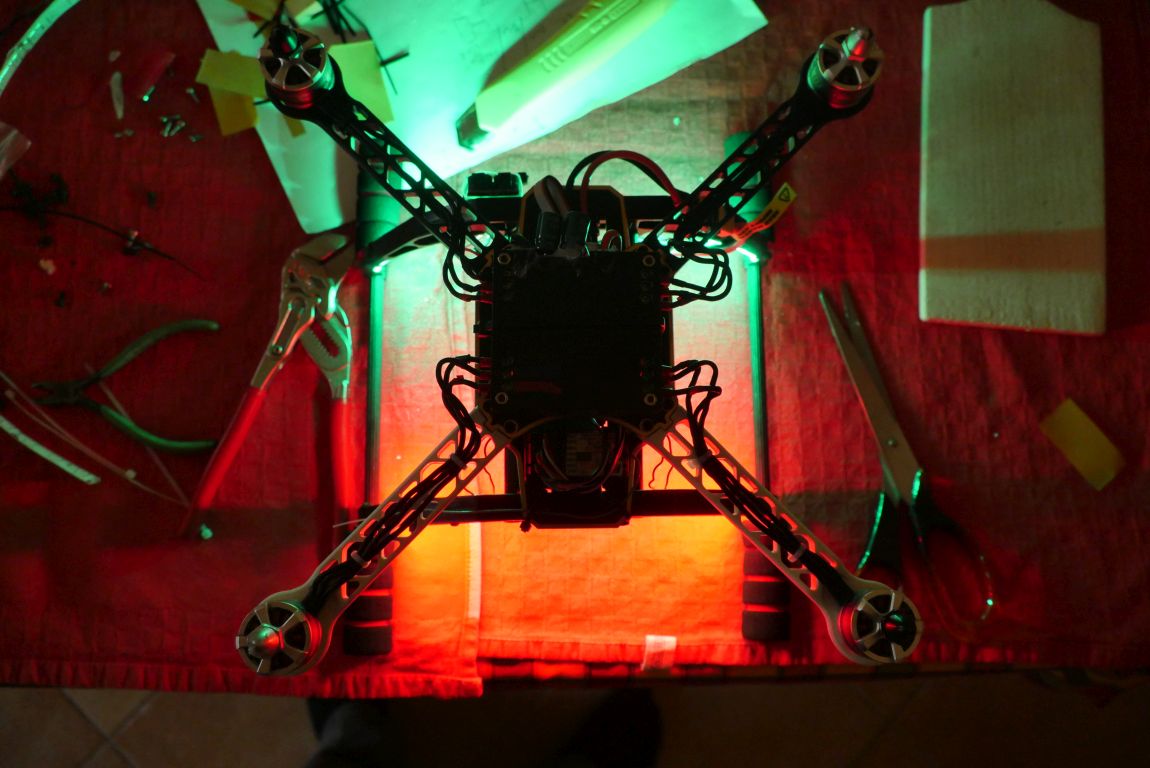
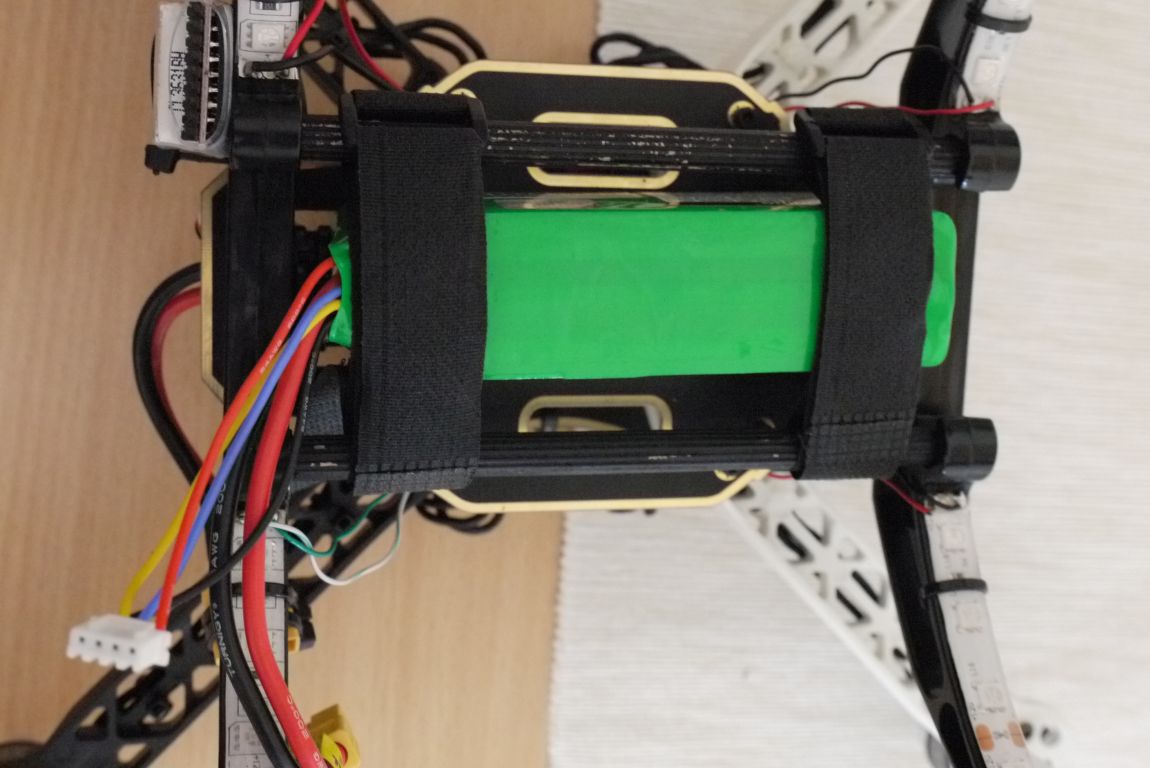
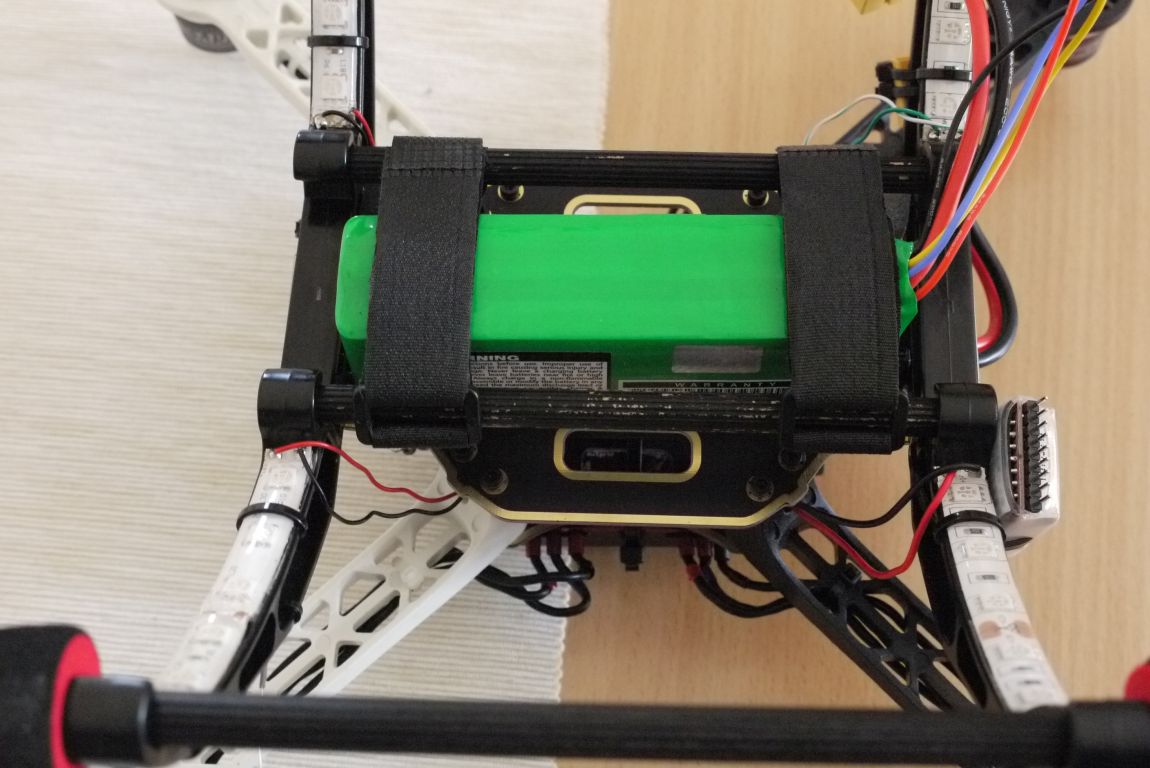
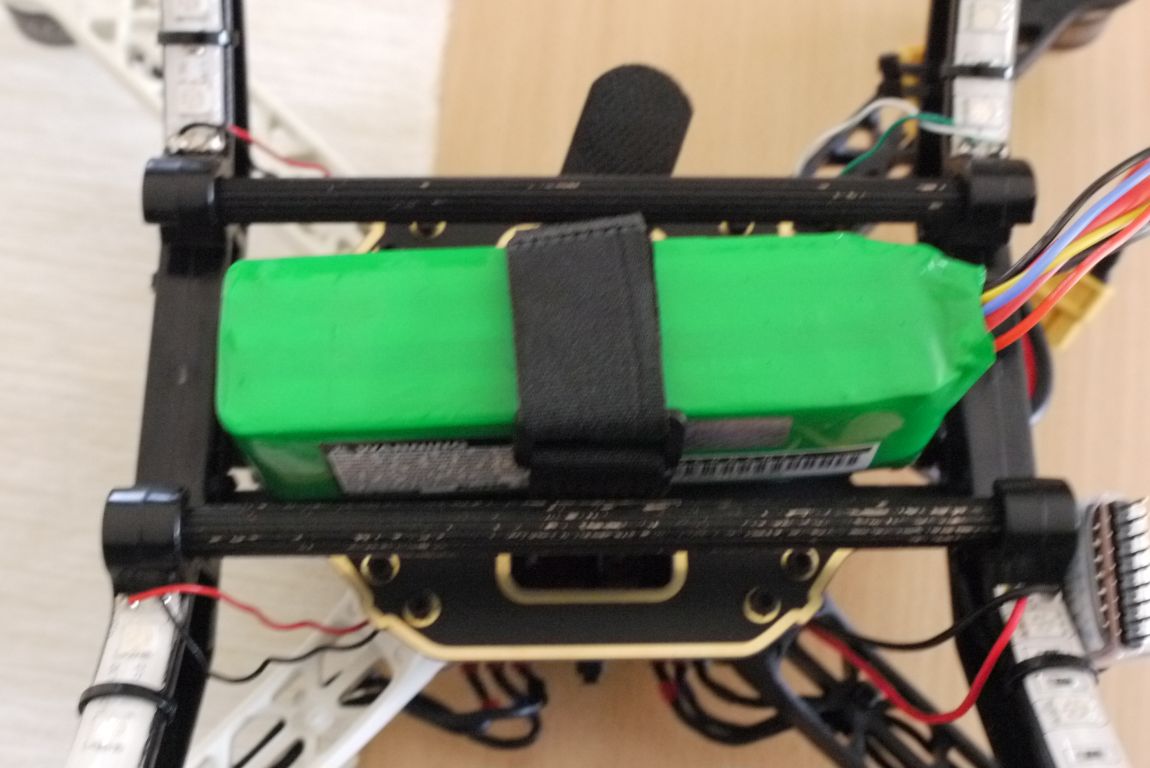
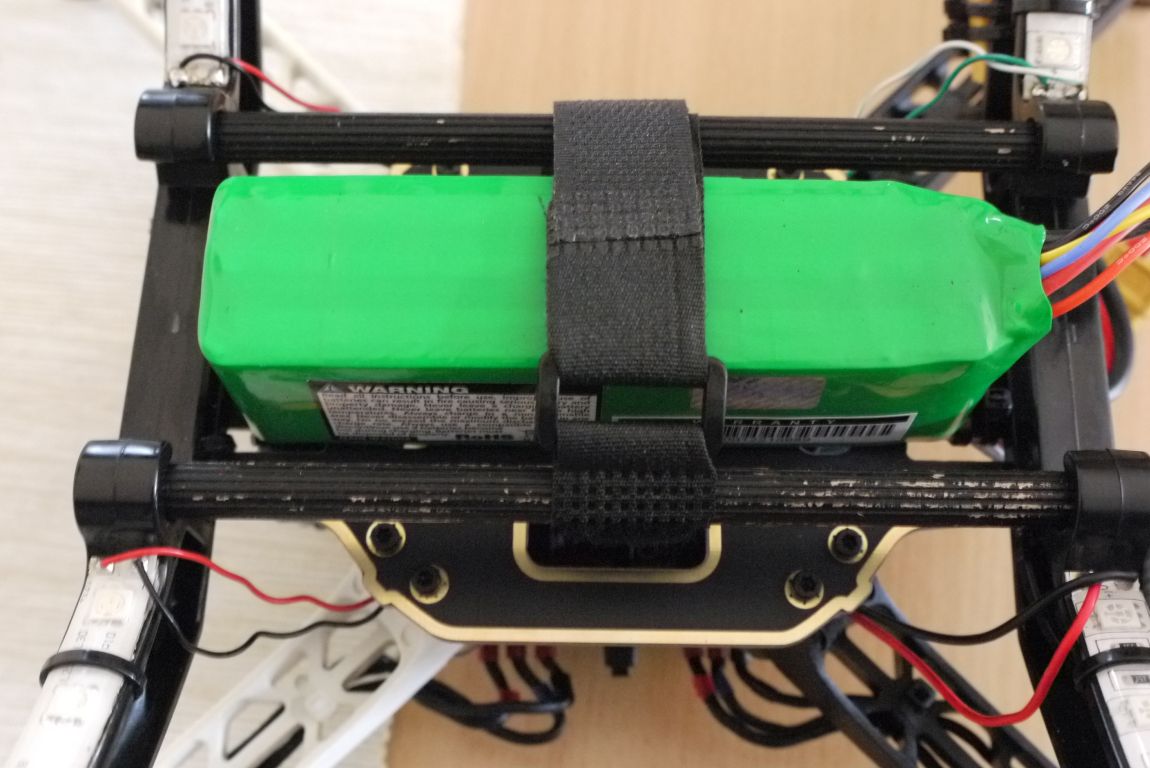
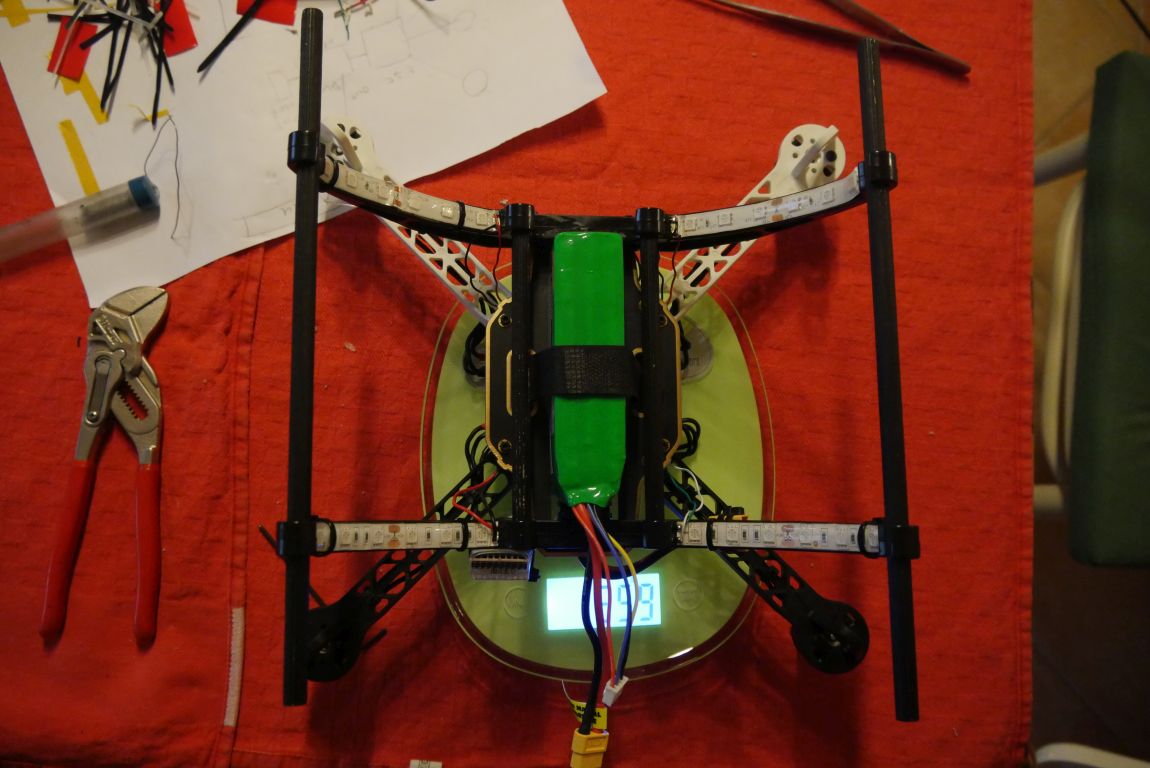
Már csak két apróság volt hátra, a feszültségjelző buzzert kellett felrögzíteni a gép jobb hátsó lábra, illetve az akkumulátort a megfelelő módon elhelyezni. Itt szintén két lehetőségünk volt, egyetlen velcro szalaggal, a vezérlő fölött áthúzva rögzíteni a szalagot, ez volt az eredeti megoldás is. Nekem ez több szempontból sem tetszik, egyrészt feszíti a vezérlőt, ráadásul az akkumulátor el tud mozdulni repülés közben. Helyette sokkal jobb megoldás az, hogy ha a fa merevítőkön húzunk át két velcro szalagot, ezzel nem az akkumulátort szíjazzuk a vezérlőhöz, hanem a gép aljára feszítjük fel. Itt annyira meg lehet húzni a szalagokat, hogy konkrétan a vázat tudjuk vele csavarni, az akkumulátort pedig kézzel is nagyon nehéz megmozdítani, úgy áll mint a fagyott kutya lába. Sokkal stabilabb, ráadásul a súlypont is mindig középen marad. Egy hátránya van, leszedi a festéket a merevítőfáról, szóval ezt újra kell időnként festeni.
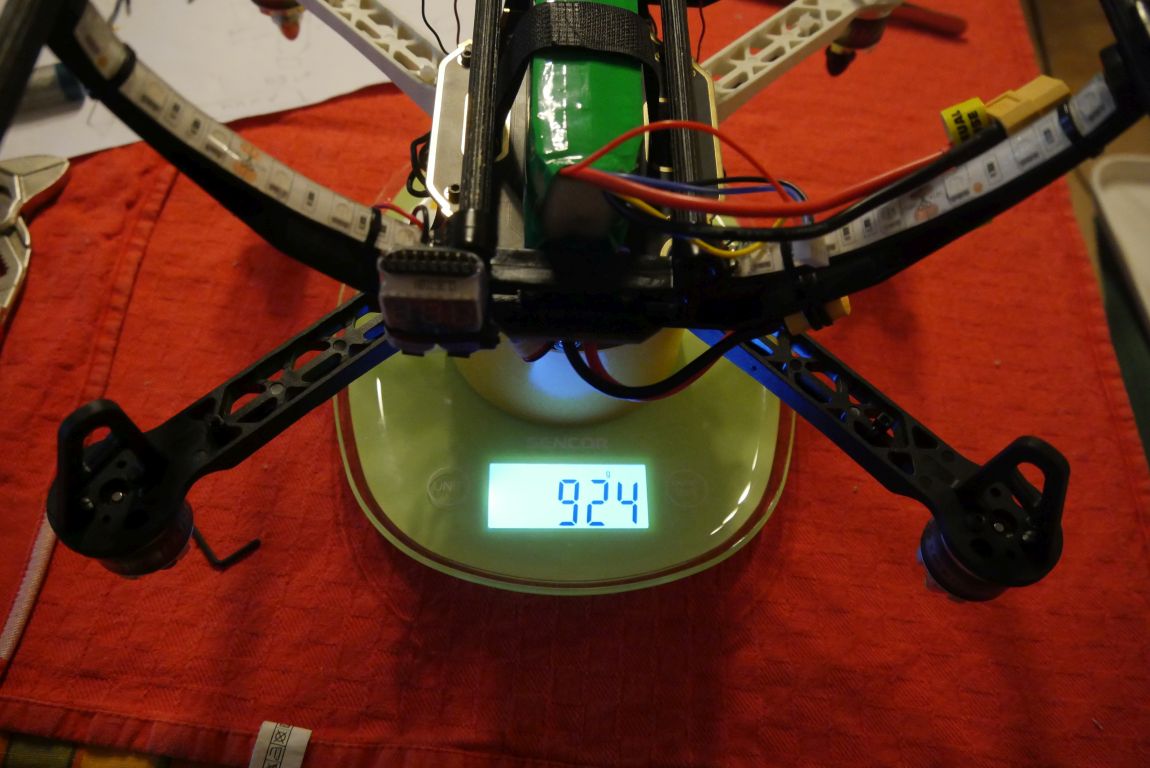
A gép felszálló tömege 970 gramm lett, akkumulátor nélkül 721 gramm, értelemszerűen az akkumulátor így 249 grammot nyom. Nagyjából 12-15 percet képes a levegőben maradni a 4000mAh 3S akkumulátorral (érzésre, még nem mértem), érezhetően stabilabb lett, mint az előző verzió, viszont még mindig elég erős, ha nyomjuk neki.
Fogok további teszteket csinálni, de addig is vonjuk le a tanulságokat és csináljunk egy pénzügyi számvetést (a mai árakon):
ALKATRÉSZLISTA (szerszámokat és egyéb anyagokat nem számolva)
| ALKATRÉSZ | TÍPUS | ÁR |
| Váz | DJI F330 replika | 2901 |
| Talp | DJI landing skid | 780 |
| Leszállótappancsok (4 db) | Walkera Tali | 376 |
| Akkumulátor (Battery) | Multistar 4000mAh 3S | 5000 |
| Feszültségjelző (Buzzer) | 2X2 in 1 Lipo Battery LVT | 1100 |
| Vevő (Receiver) | Flysky FS-A6 | 2835 |
| Repülésvezérlő (FC) | Naze 32 Full 10DOF | 7376 |
| Sebességszabályzó (ESC) | Emax 4 in 1 25A | 8316 |
| LED (2 db) | 1M 5050 SMD 60LED | 2032 |
| Motor (4 db) | DYS BX2212 920KV | 13260 |
| Propeller (4 db) | Gemfan 8045 | 1214 |
| ÖSSZES KÖLTSÉG | 45190 Ft |
Vagyis 45000 Ft-ból van egy gépünk, erre jön rá a távirányító, ami az én esetemben egy Emax Nighthawk EM-16, ez kb. 12.000 Ft. Ennél olcsóbban távot nem nagyon fogunk találni, ennek az árával a móka valahol 60.000 Ft alatt áll meg egy picivel.
Mint látható, sokkal inkább élvezetből kell ilyen gépeket építeni, sem mint költséghatékonysági okokból, viszont így kapunk valamit, ami csak a mienk, egyedi és tulajdonképpen ennek az egész hobbynak ez a lényege.
Ami a tanulságok levonását illeti:
- A váz alsó része nagyon merev lett, ám a középső részen nyugvó felépítményt ha megnyomom a motoroknál, csavarodik a felépítmény, ez lehetne jobb
- a motorokat csak két csavarral lehet felfogatni, ez elég, de 4 csavarral szebb lenne
- egy üreges karral rendelkező váznál az ESC-ket ki lehetne tenni a karokra, így helyet lehetne megtakarítani pl. a GPS-nek
- a nagyon merev lábak egyben nagy helyet is foglalnak el a táskában, ezért nehéz lesz szállítani a gépet
- kicsit nehéz lett a gép, egy 100 grammal lehetne könnyebb
- sajnos 8045-ös propellereknél nagyobbak nem férnek rá, különben beleütnek a vázba vagy egymásba, ezért nem tudjuk tovább finomítani a stabilitást és a hatékonyságot
- Az XT60-amit kivezettem a vázra annyira szorul, hogy még a gyorsszorító+kétoldalú ragasztó sem tartja a helyén, nehéz kihúzni, mert elmozdul, ezen a következő verziónál változtatnunk kell
- A Nazer 32 full nem egy kimondott kamera platform vezérlő
- A gép nem elég magas gimbalhoz és kamerához, bár van ötletem, mivel lehetne ezt a problémát megoldani (de nem mondom meg, legyen ez a következő cikk tárgya)
Összességében nem vagyok elégedetlen, de azért folyamatosan fogok dolgozni a gép finomításán, aztán jöhet a Mark II., a már korábban "belengetett" karbonvázzal.
EGYÉB DOLGOK
Nem minden képet tettem fel és különösen nem az eredeti méretben. Aki szeretné az összeset látni, annak két .rar fájl áll a rendelkezésére, egyikben a 4K képek (Panasonic Lumix DMC-GX8), a másikban a Full HD képek (Panasonic Lumix DMC-GF1):
A cikksorozat további részei:




