Építési napló 1.1, Leépítési napló - az első lépés a szétszedés

FRISSÍTVE: 2016.07.06.
Az Ogre áldozatul esett a kíváncsiságomnak. Szétszedtem, mert érdekelt, hogy Marciart hogyan rakta össze anno. Írtam már egy posztot azzal kapcsolatban, hogy miket szeretnék rajta változtatni, de amíg a temérdek mennyiségű alkatrész beömlik az országba, addig bizony várni kell, az meg sosem volt az erősségem:D Mivel képtelen voltam várni, úgy gondoltam, milyen jó ötlet lenne szétszedni mindent darabjaira, egyrészt, hogy megértsem a bekötéseket, másrészt, hogy lássam a felhasznált anyagokat.
Szerintem az egyik kardinális kérdés, hogy ahová rögzíteni szeretnénk valamit, ott milyen anyagokat fogunk felhasználni. Nekem az a verziótetszik, ahol nem használunk permanens megoldásokat, hanem úgy oldjuk meg az alkatrészek elhelyezését, hogy később is hozzá lehessen nyúlni. Kétségtelen tény, hogy pl. a forrasztásokat lehet permanens megoldásokkal védeni, de az én elképzelésem az, hogy valamilyen kétoldalú ragasztóval felragasztom a gép elemeit a nyákra, ahol kell, ott forrasztok, majd áthúzom őket egy színben megfelelő gyorsszorítóval, amiből vettem 200-200 db-ot (fehéret és feketét). Így az elemeken nem látszik a csúnya ragasztás, még is stabilan helyükön maradnak, illetve bármikor leszerelhetőek. Az is megoldás lehet, ha valamilyen puha, de ragadós anyagra helyezzük el az áramköri elemeket, mert amiben áram folyik, általában nem nagy barátja a rezgéseknek és az ütéseknek.
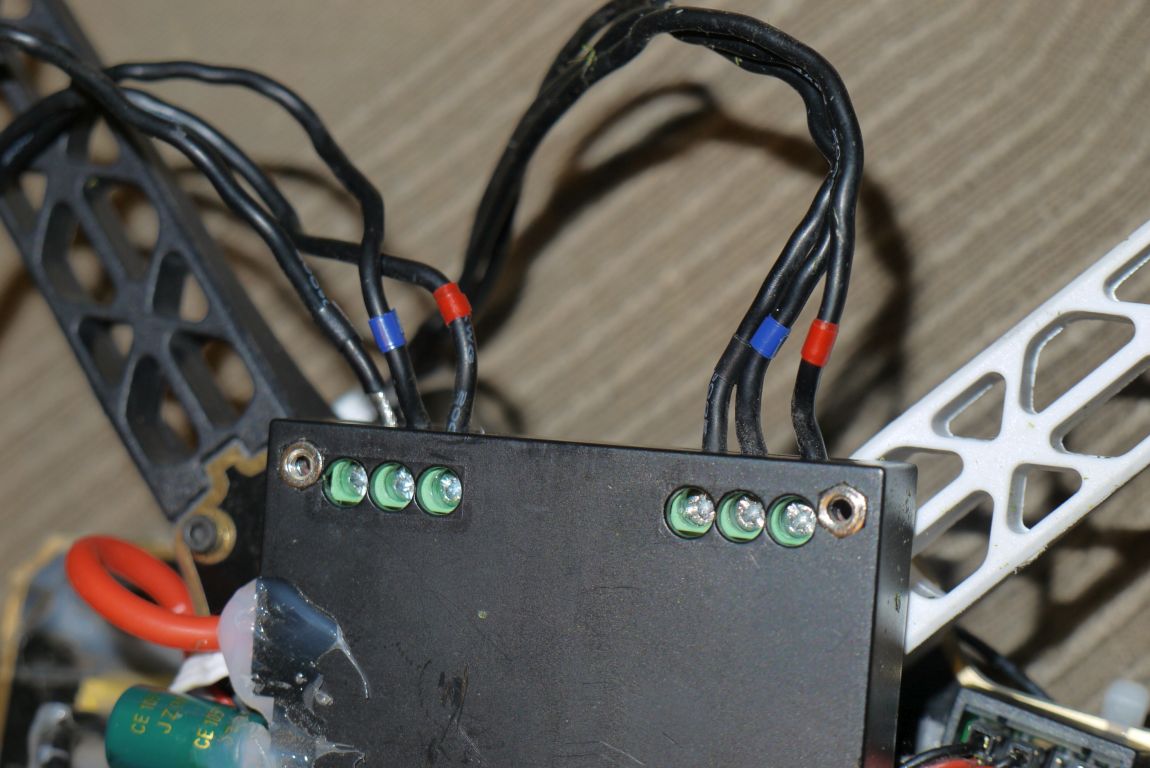
A másik fontos dolog volt, hogy az ESC-vezérlő-vevő hármas összekötéseit megvizsgáltam. A szétbontás előtt működött, tehát ha azt a bekötési sorrendet feljelölöm, akkor a széthúzás után pont ilyen sorrendben össze is lehet majd rakni a dolgokat, még akkor is, hogy ha azokat máshova szánjuk. Néhány dolog a szétszerelés közben is eszembe jutott, ezek az alábbiak voltak:
- vettem két színű - piros és zöld - 12V-os ledszalagot, amelyet a gép leszállólábaira fogok elhelyezni. Ezek a ledszalagok 3 ledenként gond nélkül szétvághatóak, illetve a legkisebb kiszerelés 1 méter, vagyis ez bőven elég lehet mindenre. Ezeket a 12V-os PDB csatlakozóra fogom forrasztani
- vettem 4 db 5V-os, a Naze 32-vel Cleanflight alól vezérelhető ledsort. Ez felprogramozható különböző módon, pl. failsafe, low voltage alarm esetén más-más fényjeleket tud adni. Ezek fognak a karok aljára kerülni, így két külön ledvezérlés is rendelkezésre fog állni. Ezeket a vezérlő megfelelő bemeneteire kell majd kötni
- vettem két típusú buzzert, az egyik az akkumulátor balansz csatlakozójára fog kerülni és nagyon hangosan fog sípolni, ha a feszültség eléri a cellánkénti 3.5V-ot. A másik egy Emax buzzer, ami a VBAT portról vezérelhető és a gép elvesztése esetén a távról csipogtatható
- vettem továbbá XT60 apa csatlakozót, de olyat, amihez adnak 10 cm kábelt, ugyanis arra gondoltam, hogy ezt beforrasztom a betáp oldalra, de meghagyom flexibilisnek és leviszem a váz alá az akkumulátor szintjére, hogy ne fent foglalja a helyet. Neki mindegy, hol lóg, egy kérdés van, hogy mennyi kontakhibát viszek be ezzel a rendszerbe, viszont így értékes területet tudok felszabadítani a vevő számára
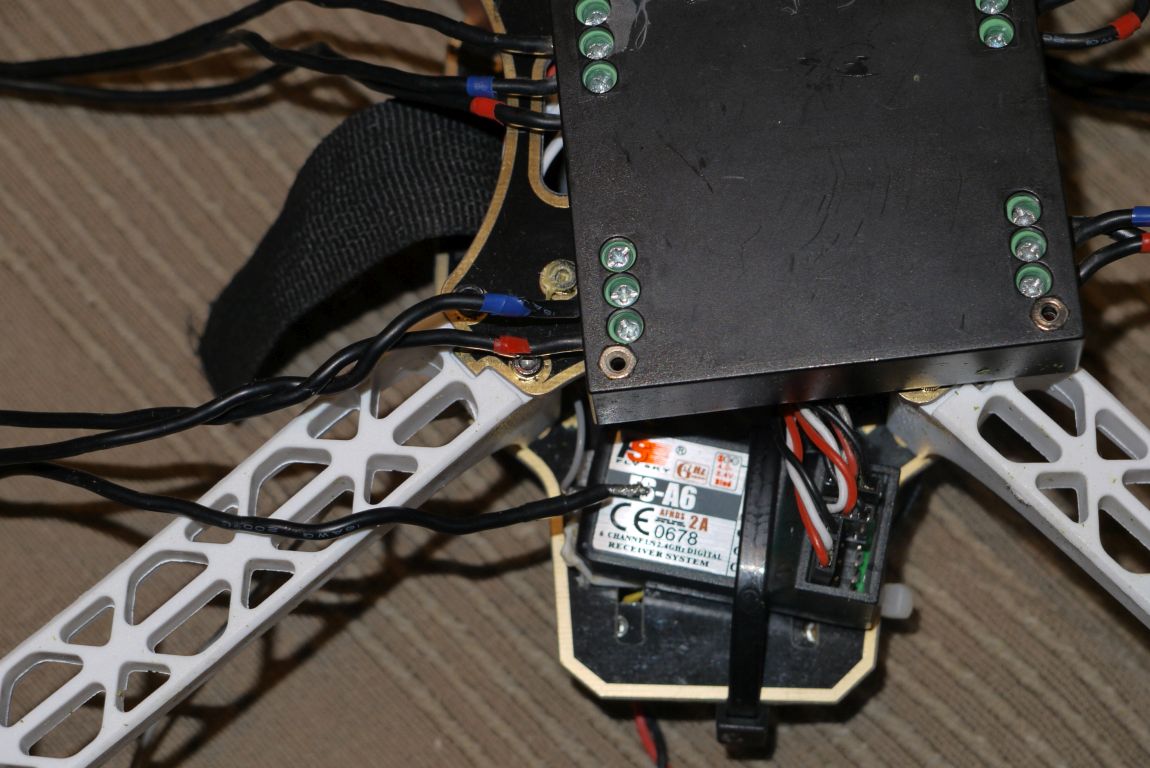
- mivel a Flysky FS-6B vevő kapcsán volt egy olyan gyanúm, hogy nem működik vele a failsafe, ezért elhatároztam, hogy vevőt is fogunk cserélni, egy Flysky FS-iA6B tudja a PPM-et és két antennája van, ezt asszimetrikusan el fogjuk vezetni az egyik első és egy másik hátsó kar alatt (vagy le a lábra), hogy a gép ne tudjon úgy állni, hogy ne fogja a jelet, de még az is lehet, hogy zsugorcsőbe húzzuk és "elszöcskésítjük" a gépet
Térjünk vissza a vezérlőhöz. A lenti képen láthatjátok a vezérlő lábkiosztását. A dolog viszonylag egyszerű (nekem tokozott verzió volt), mert a műanyag burkolaton jelölik az output és az input oldalt. Az output értelemszerűen az ESC-k felé menő, míg az input a vevőről jövő parancsokat továbbítja. A rajzon szépen minden fel van jelölve, a lila keretezésből látszik, hogy 6 csatornát tud továbbadni az ESC felé a Naze 32, vagyis maximálisan hexamotoros géppel használható. Mellette a buzzer bemenet (ide kerül majd az Emax) és a VBAT vagy más néven voltage detect port található, ebből tudja majd a vezérlő, hogy mennyi az akkumulátorok feszültsége.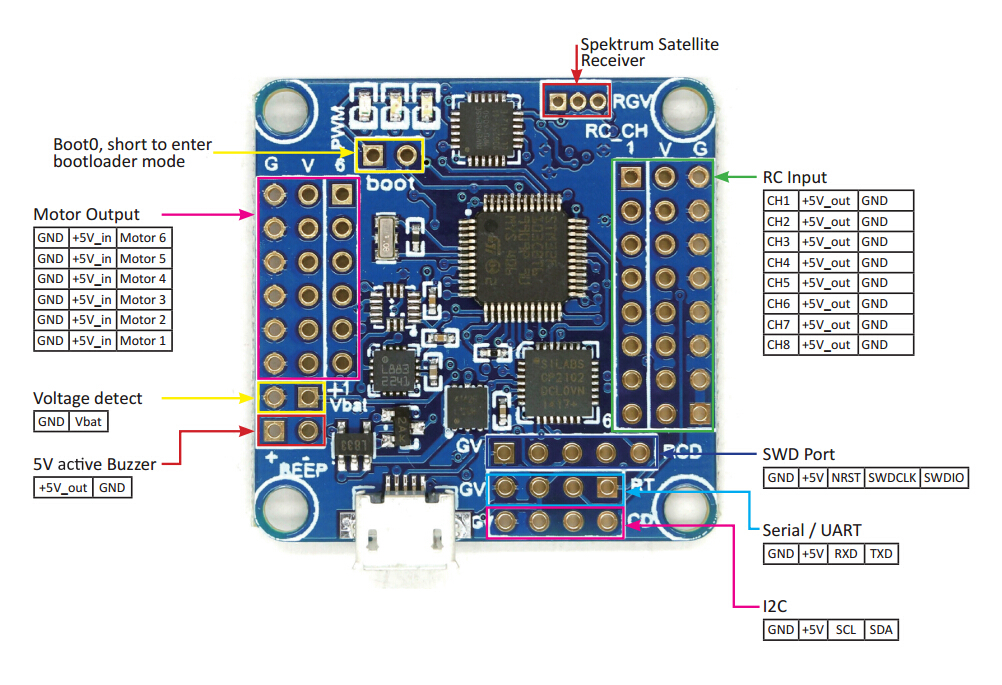 A vezérlő jobb oldalán látjuk a vevő felé mutató lábakat, itt ugye 8 csatornát tudunk kezelni. Ebből 4 a throttle, roll, pitch és a yaw, illetve még 4 valami. Ez a 4 valami az alábbiakból fog összeállni (ha egyszer lesz egy legalább 8 csatornás adóm és vevőm): buzzer, fény ki-be és még 2 csatorna fenntartva tartaléknak.
A vezérlő jobb oldalán látjuk a vevő felé mutató lábakat, itt ugye 8 csatornát tudunk kezelni. Ebből 4 a throttle, roll, pitch és a yaw, illetve még 4 valami. Ez a 4 valami az alábbiakból fog összeállni (ha egyszer lesz egy legalább 8 csatornás adóm és vevőm): buzzer, fény ki-be és még 2 csatorna fenntartva tartaléknak.
Ami lényeges és eleinte engem is megtévesztett (ami pusztán a tapasztalatlanságomra utal), hogy a föld minden lábon össze van kötve a sorban, ezért bármelyiken visszük át a tápfeszültséget, annak jónak kell lennie. Ezért az első 3 csatornán csak a jel megy át, a 4-en jön át a tápfesz (piros vagy +), föld (fekete vagy -) és a jel (fehér) és a 6-on szintén csak a jel, de mivel nem volt más csatlakozó, ezért 3 pin van bedugva (de ebből a piros-fekete nem csinál semmit). Ami még látható, hogy az 5-ös csatorna üres, míg az ESC oldalon be van kötve, ez csak azt jelenti, hogy a Cleanflightban szoftveresen variálható, hogy melyik csatorna mivel álljon szemben (a rajz szerint a 4-4-el, míg az 5-6-al áll szemben).





A másik fontos dolog, amit még tudnunk kell, hogy a 12V-s forrasztási pontokra az alábbi dolgokat kell beforrasztani:
- 12V-ra az XT60-as csatlakozót, mint betáp, ide kötjük az akkumulátort
- 12V-os lábra a ledeket, amelyek a gép leszállólábára kerülnek
- 12V-os lábra az ESC-ket
Szóval nem sokat kell forrasztani, ez a lényeg. Így szerintem sokkal egyszerűbb elkezdeni a gép építését, mint nulláról, főleg hogy már a vázat is összeraktam (amit most majd szétszedek:D).





A másik problémakör az elemek megfelelő elhelyezése. Az alábbi szempontokat kell figyelembe venni:
- általánosságban elmondható, hogy az elemeket úgy kell elhelyezni, hogy azokat a váz védje, zuhanás esetén
- a súlypont akkor jó, ha lent van, vagyis a föld felé kell, hogy essen. Ezért az akkumulátort a merevített lábakba, a PDB alá fogom elhelyezni. Ez azért fontos, mert ha leszállunk a géppel, de a súlypont magas, már akkor is felborulhat a gép, illetve egy-egy félresikerült felszállás hasonló eredménnyel járhat. Ez jobb esetben semmi, rosszabb esetben váz, propeller törés vagy akár motorleégéshez is vezethet
- a leszálló talpak felületét puha anyaggal kell burkolni
- a vezérlő és az ESC a legérzékenyebb, ezeket teljesen a váz belsejébe vagy a felépítmény tetejére kell elhelyezni (ritkán esnek fejre a gépek)
- a motorok helye adott, de lehet felszerelni a karra motorvédő műanyagot
- A vevőt tulajdonképpen mindegy, hogy hová helyezzük el, a fontos az, hogy az antennák viszonylag szabadon fussanak a karokon, vagy lógjanak le a lábakra, esetleg mind a kettő, ezért is vettem kétantennás vevőt. Fontos, hogy ne takarják más elemek, amik blokkolhatnák a hullámokat
- ha esetleg lesz valaha GPS vevő (ez vezérlőcserével járna) vagy FPV, akkor hagynom kell nekik szabad helyet a váz valamelyik részén ahová ezt el tudjuk helyezni
- a csipogón van feszültség visszajelző kijelző (micsoda szójáték), ezt mindenképpen olyan helyre kell tenni, hogy le lehessen olvasni
A szétszedés során egyébként kiderült, hogy a felső tartólemez eltört, ezért egy csavarral kevesebb tartotta az egyik vázkart, illetve volt egy motor ami összesen egy csavarral volt rögzítve, ezeket az építés során orvosolni fogjuk.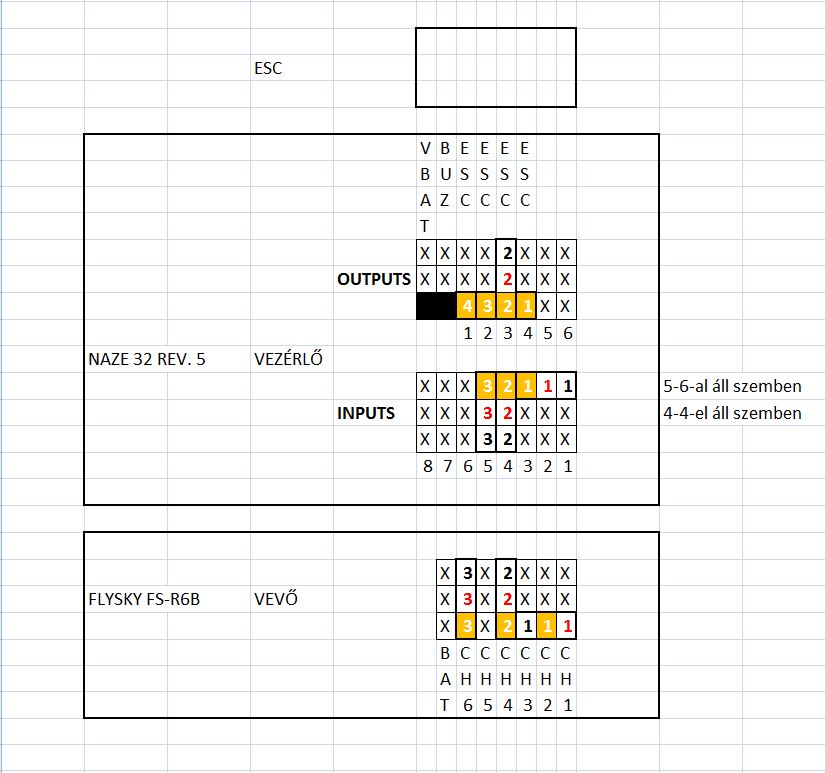
A cikksorozat további részei:




