Arduino alapú motor mérő - csináld magad, ha szolgád nincsen
 A dróntervezésnek van egy olyan varázsa, hogy az ember sosem tudhatja, hogy amit épít, az igazán jó lesz-e. Még ha az optimális esetet vesszük is, akkor is lehetnek buktatók olyan helyeken, ahol nem is várjuk: nem valós paraméterek, túlbecsült alkatrészek és persze az építő is hibázhat, hiszen mi sem vagyunk tökéletesek. Ezt két módon tudjuk kiküszöbölni, az egyik hogy veszünk egy gyári gépet, reméljük, hogy jól be is van állítva és örülünk, mint majom a farkának. Verzió 2: mi építjük meg azokat a berendezéseket, amelyekkel mérni tudunk műszaki paramétereket. Ma az utóbbit fogjuk tenni, kisebb-nagyobb eredményekkel.
A dróntervezésnek van egy olyan varázsa, hogy az ember sosem tudhatja, hogy amit épít, az igazán jó lesz-e. Még ha az optimális esetet vesszük is, akkor is lehetnek buktatók olyan helyeken, ahol nem is várjuk: nem valós paraméterek, túlbecsült alkatrészek és persze az építő is hibázhat, hiszen mi sem vagyunk tökéletesek. Ezt két módon tudjuk kiküszöbölni, az egyik hogy veszünk egy gyári gépet, reméljük, hogy jól be is van állítva és örülünk, mint majom a farkának. Verzió 2: mi építjük meg azokat a berendezéseket, amelyekkel mérni tudunk műszaki paramétereket. Ma az utóbbit fogjuk tenni, kisebb-nagyobb eredményekkel.
Viszonylag triviális dolog, ha azt mondom, hogy a drónokat jellemzően áramfogyasztás megbecsülésével szoktuk megtervezni. Az áramfogyasztás érinti a motorokat, propellereket, ESC-ket, az akkumulátort, a PDB-t, a kábelezést vagyis legalább a fő részegységek felét, ráadásul enélkül nem nagyon fogunk tudni úgy repülni, hogy kockáztassuk az elfüstölést. Ehhez viszont tudnunk kell, hogy egy adott propellert használva, adott feszültség mellett egy motor mennyi áramot vesz fel. A mérőpad sok más dologra is jó, pl. ha tudjuk, hogy mennyi áramot fogyaszt egy motor, kikereshetjük a gyári táblázatokból, hogy mekkora emelőerőt képes előállítani, amiből tervezhetünk pl. összsúlyt, megállapíthatjuk a lebegési pontot stb.
Természetesen a fenti értékeket általában a gyártók is megadják, ha nem is teljes körűen, de legalább részlegesen. Persze nem egy olyan esettel találkoztam, amikor ez nem állt rendelkezésre, szóval lehetett tippelgetni és saccolgatni az értékeket. Ha még rendelkezésre is állnak adatok, akkor sem biztos, hogy minden propellerméretre és minden akkumulátor cellaszámhoz rendelkezésre bocsájtják azokat, nem beszélve a tévedés esélyéről. Nincs mese, itt bizony mérni kell, ha eredményt akarunk felmutatni.
A mérést két módon is megtehetjük, vehetünk egy ún. thrust standet, vagyis emelőerőt mérő teljesítménypadot. Akinek ez elég, az válogasson az alábbi linkek közül:
- RC Lander thrust stand: mérőpad hobbystáknak
- RC Lander full alloy ts: komplett hajtóművek mérésére alkalmas mérőpad
Aki ennél profibb megoldást keres, az látogasson el az általam is nagyra becsült Rcbenchmark weboldalára és nézelődjön egy kicsit (és jól tömje ki a pénztárcáját dollárokkal, olyan 150-500 USD mértékben:D).
Aki viszont építene, annak magának kell megterveznie a mérőpadot. Ám mielőtt fejest ugrunk a tervezésbe, egy egyszerű, ám hasznos dolgot elkészíthetünk, egy motor testert, ami tulajdonképpen egy 1/4-ed drón alkatrészeiből áll össze, egy kis Arduinoval megfűszerezve. Ez kiválóan alkalmas arra, hogy motorokat indítsunk be tesztelési céllal, pl. amikor használtakat vásárolunk valakitől (én már vettem többször így motort és az eladó a helyszínen ezzel a módszerrel demonstrálta, hogy működnek). Az alábbi alkatrészekre lesz ehhez szükségünk:
- Abban az esetben, ha BEC-el rendelkező ESC-t használunk: 1 db BEC ESC, 1 db motor, 1 db vevő, 1 db távirányító, XT60 csatlakozó, 3-3 db anya-apa bullet connector, akkumulátor
- Abban az esetben, ha opto ESC-t használunk: 1 db opto ESC, 1 db motor, 1 db vevő, 1 db távirányító, XT60 csatlakozó, PDB 5V BEC-el, 3-3 db anya-apa bullet connector, akkumulátor
1. esetben: a 3 fázisú motor 3 kábelére forrasszunk 1-1 apa bullet connectort, míg az ESC-re 1-1 anya bullet connectort, így bármikor bontható marad a kontaktus. Az ESC BEC ágát dugjuk fel egy vevő 3. csatornájára (ez a gáz), majd a vevőt párosítsuk a távval. Az ESC másik oldalára, a pozitív-negatív kimenetre tegyünk egy, az akkumulátoréval azonos csatlakozót, így be tudjuk táplálni a motort. A gázkar állásával pedig szabályozhatjuk a forgás sebességét, már kész is a motor teszter.
2. esetben: annyiban tér el az első esettől, hogy kell egy PDB amire felforrasztjuk az ESC-t, egy XT60 csatlakozót, ahová az akkumulátort fogjuk csatlakoztatni, illetve egy szervo kábel, amit a PDB 5V-os ágára forrasztunk. A szervo kábel pozitív-negatív ága az 5V BEC-ről, a fehér jel pedig az ESC-ről fog jönni, innentől kezdve a folyamat ugyan az, mint második esetben.
Ha a fenti összeállítást elkészítettük, onnan már csak egy lépés, hogy a PWM jelet az ESC felé egy számítógépről vezéreljük, erre tökéletes az Arduino Uno és különböző kiegészítői. Az Arduino egy nyílt forráskódú elektronikai platform, amivel mindenféle szenzort tudunk vezérelni, van egy csomó analóg és digitális csatornája, vagyis akár az ESC-t is rá tudjuk kötni és vezérelni a fordulatszámot. Ha már ezt meg tudjuk tenni, akkor csak azon kell elgondolkodnunk, hogy milyen értékeket szeretnénk megkapni eredményként. Mi az alábbiakat keressük jelenleg:
- kell egy alap kit Arduino-ból, pl. egy ilyen
- fordulatszám: optikai érzékelővel megoldható, ami valamelyik Arduino szenzor szettben megtalálható
- gázállás: potméterről szabályozható az Arduino analóg kimenetén
- emelő erő: remek Arduino mérleget lehet kapni hozzá, de szobai mérleg is megteszi
- rezgés: még agyalunk a megfelelő megoldáson, de már vannak ötletek, pl. egy piezo hangszóró amiben rezgésre feszültség indukálódik, ennek mértékét pedig lehet mérni
- melegedés: még gondolkodunk rajta, milyen módon mérjük meg
- áramfogyasztás: 30A-ig lehet mérni áramot Arduino szenzorral
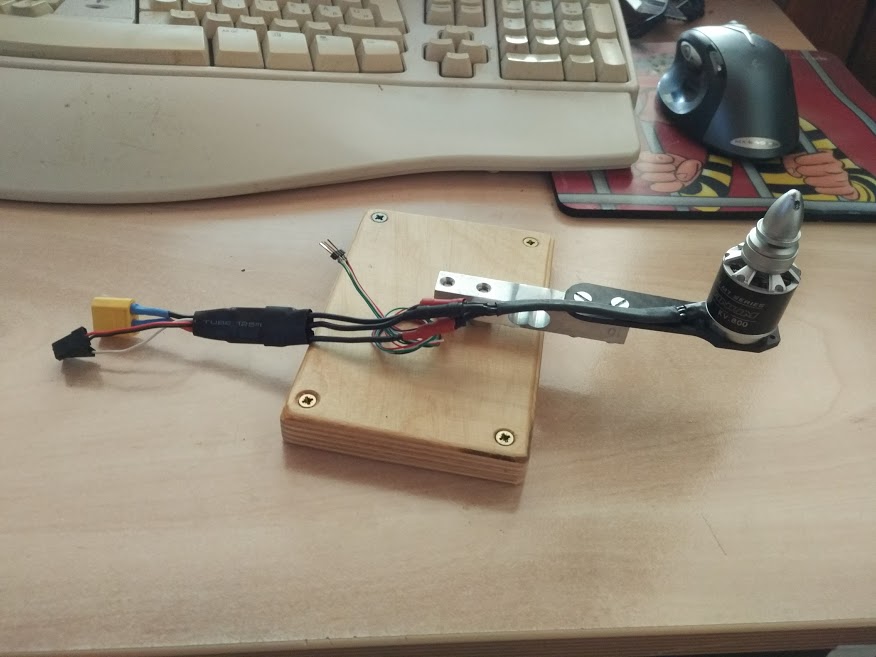
Jelenleg itt tartunk: van már motorunk, ami egy vázkaron helyezkedik el (Eachine Falcon 250 törött karbon karja), rajta az ESC és az Arduino egy PWM kimeneten keresztül szabályozza a fordulatszámot. Egy konyhai mérleg mérőszenzorával mérjük az emelőerőt, adott fordulatszám mellett, egy piezo hangszóróval pedig a rezgésértékeket íratjuk vissza (ez persze még csak arra jó, hogy különböző motorokat/propellereket hasonlítsunk össze egymással, hogy melyik mennyire rezeg a másikhoz képest, nem pedig egy egzakt skála).

Fontos megemlítenem továbbá, hogy ezt a projektet nem én csinálom egyedül, én csak az ötletet meg az alkatrészeket adtam, meg forrasztottam néhány hitványat, a munka érdemi részét Péter és Nándi barátom végzi/fogja végezni, szóval nekik jár a taps és a konfettieső, nem nekem.
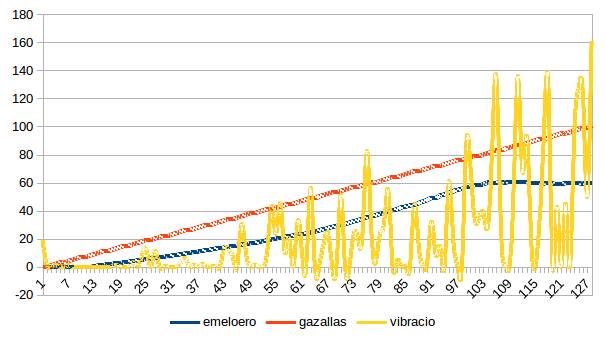
A dolog még egyelőre nem kiforrott, de párhuzamosan két ilyen tesztelőpad is épül, amolyan home projektként, meglátjuk mire jutunk. Rengeteg más dolgot meg kell még oldanunk, pl. a megfelelő védelmet, hogy nehogy átszabja valamelyik testrészünket a 10.000-el forgó propeller, hogy megfelelő felfogatást találjunk, ne csak egy drón váz egyik karjára legyen felcsavarozva a motor stb., de pont ez benne az élvezet. Hamarosan jelentkezünk az újabb építési fázissal, addig is nézegessetek kezdeti grafikonokat és videókat.