Clenaflight cseréje Betaflightra - Meghalt a király, éljen a király
 A Furibee F36S teszt kapcsán már említettem, hogy a vezérlőn futó szoftver elavult. Akkor azt mondtam, hogy akár fel is frissíthettem volna, de nem tettem meg. Helyette "átlfasheltem" Betaflight-ra, hogy a köztudatból való kikopásra ítélt Cleanflighttal ne kelljen többé nyűglődni.
A Furibee F36S teszt kapcsán már említettem, hogy a vezérlőn futó szoftver elavult. Akkor azt mondtam, hogy akár fel is frissíthettem volna, de nem tettem meg. Helyette "átlfasheltem" Betaflight-ra, hogy a köztudatból való kikopásra ítélt Cleanflighttal ne kelljen többé nyűglődni.
Több objektív oka is volt, amiért meg kellett lépnem a szoftvercserét. Egyrészt sokkal egyszerűbb egyetlen szoftvert kezelni a gépeken. A Falcon elbontásával megszabadultam a LibrePilottól, míg a többi gépen már leginkább csak Betaflight fut. Volt már kis géppel Betaflightos tapasztalatom, ilyen volt a Furibee F90 és az Eachine Tiny QX 90C is, tehát már három olyan kisgépem is volt, amin Betaflight futott, éljen az egység (ha pedig lesz egy negyedik, elnevezzük őket a négy muskétásnak).
A szoftver cserétől eleinte ódzkodtam, ugyanis már több vezérlőt sikerült berohasztani vele, igaz egyiket sem Betaflighttal, de mindig akad egy segítő kéz, aki a remek rc közösségből kisegít, most RDS Gábor volt a segítségemre. Az első lépés a vezérlő kiderítése volt, amihez több eszközt is igénybe vehetünk. Van aki ráolvasással, vagy üveggömb nézegetéssel próbálja meg megtippelni a típust, van aki az eladó oldalát nézegeti, de ezek azért nem feltétlenül megbízható források.
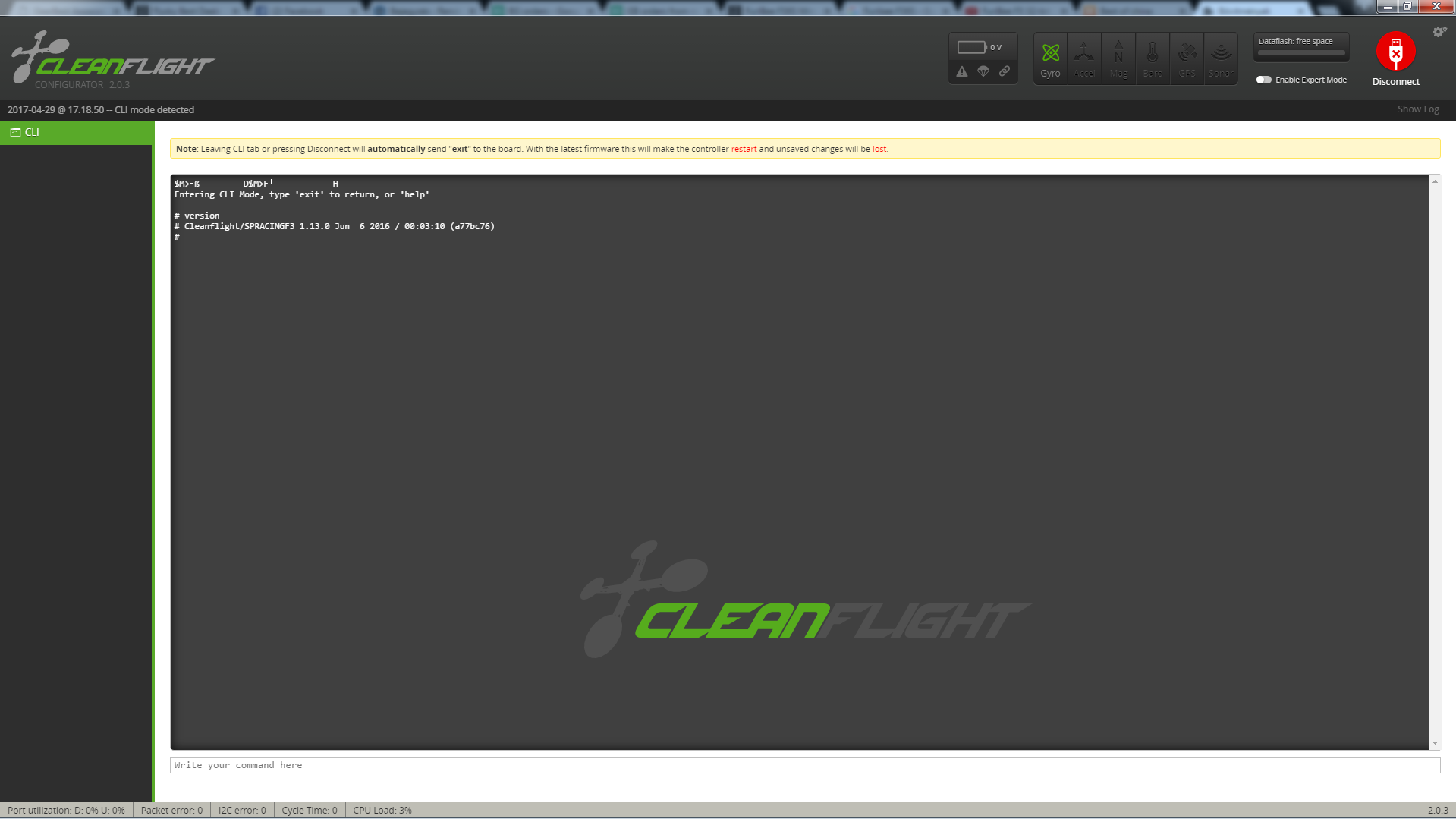
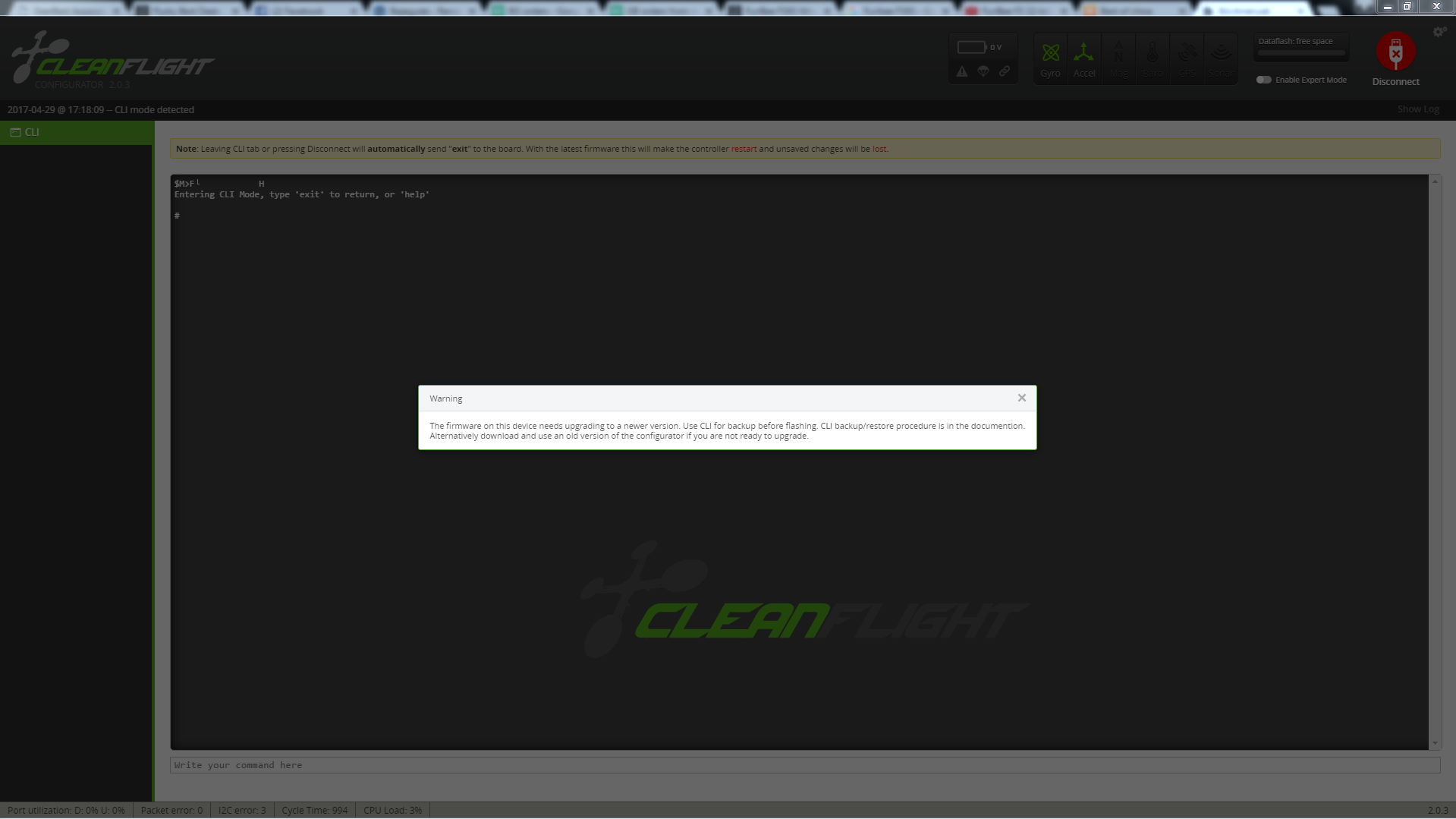
Ennél sokkal jobb módszer, ha a Cleanflight/Betaflight nyitólapján lenyitjuk a "show log" fület, és megnézzük milyen típust ír ki a szoftver. Az én esetemben SR F3 jelent meg, vagyis egy Seriously Pro STM32F3 chippel szerelt vezérlővel kell megbirkóznunk.
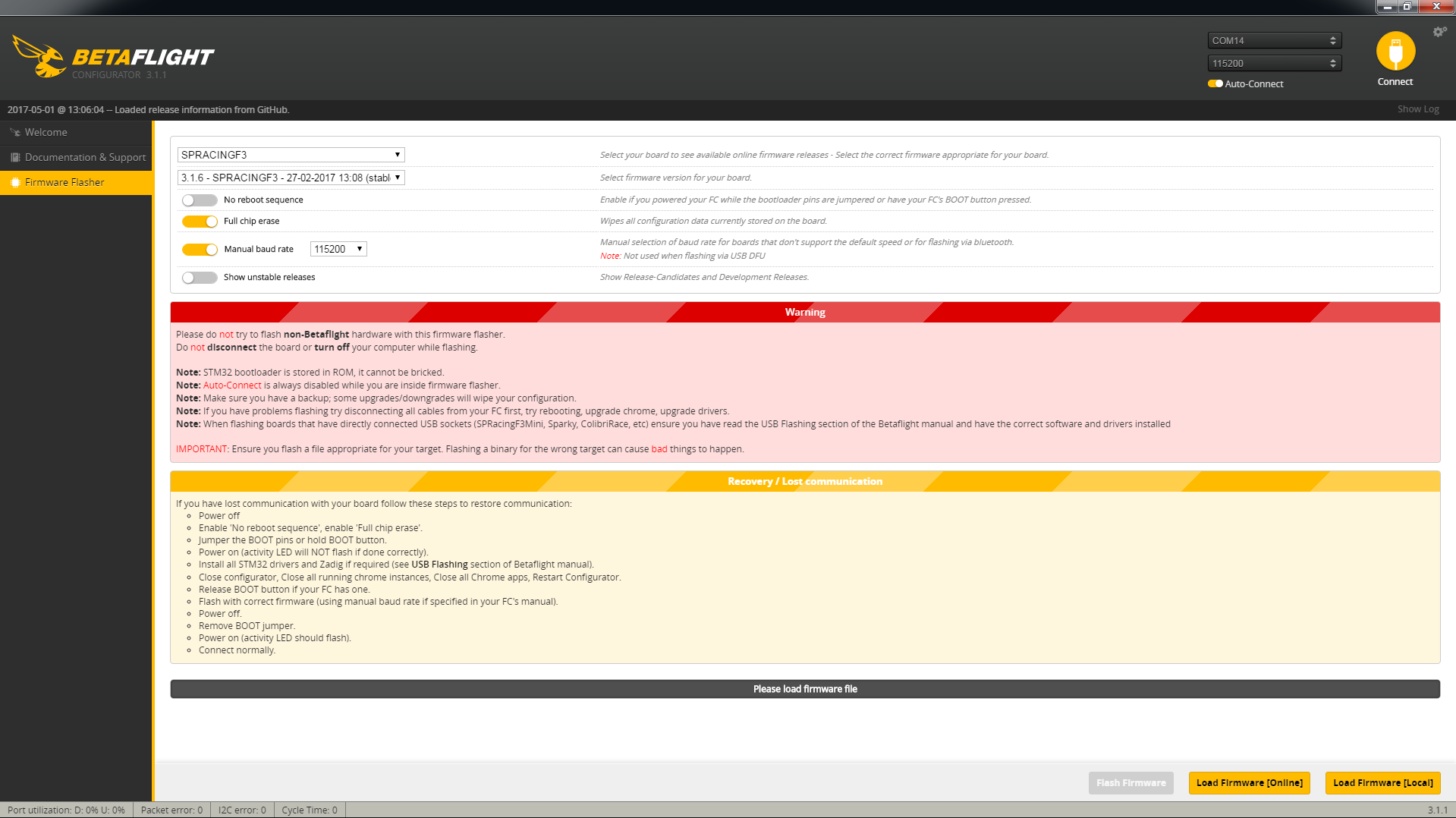
Indítsuk el a Betaflight szoftverét és a fő lapon válasszuk a Firmware Flasher menüpontot. Keressük meg a lenyíló menüből az SPRACINGF3 boardot és tegyük fel az utolsó előtti 3.1.6-os stabil verziót. Azért ne a 3.1.7-et, mert az új dolgokkal mindig lehetnek problémák, ez már egy kipróbált variáns, maradjunk ennél. Válasszuk a "full chip erase" menüpontot és a "manual baud rate =115200" sorokat, majd nyomjuk meg a "flash firmware" gombot.
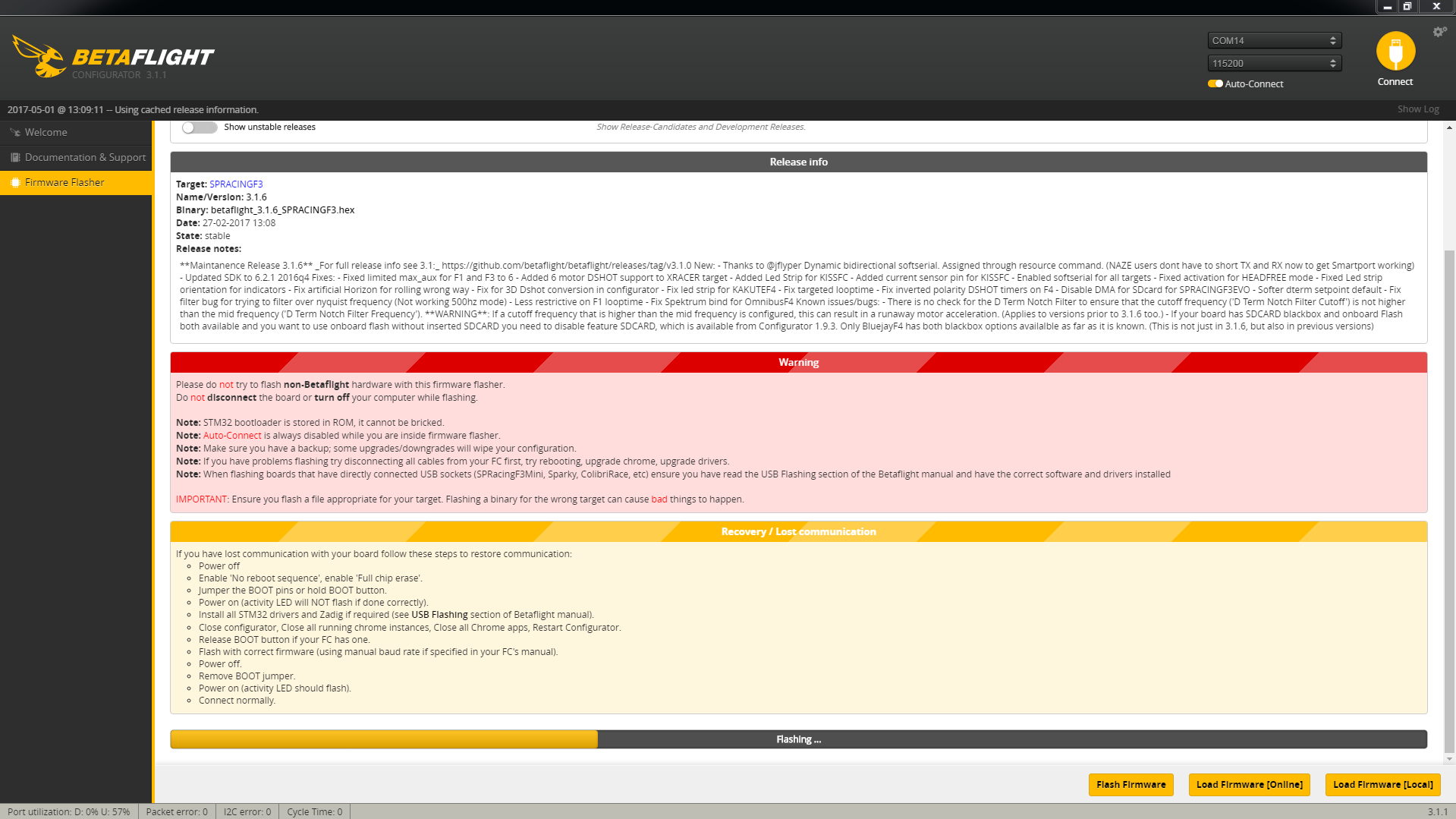
Ekkor elkezdi húzni a program a képen a csigát, majd a végén kiírja, hogy sikeresen megtörtént-e a művelet, Ha ezzel megvagyunk, indítsuk el a Betaflightot, majd mentsük el a konfigurációt a backup gombbal. Ebben semmi mágia, nem kell CLI parancsokkal küzdeni, mint a CF esetében.
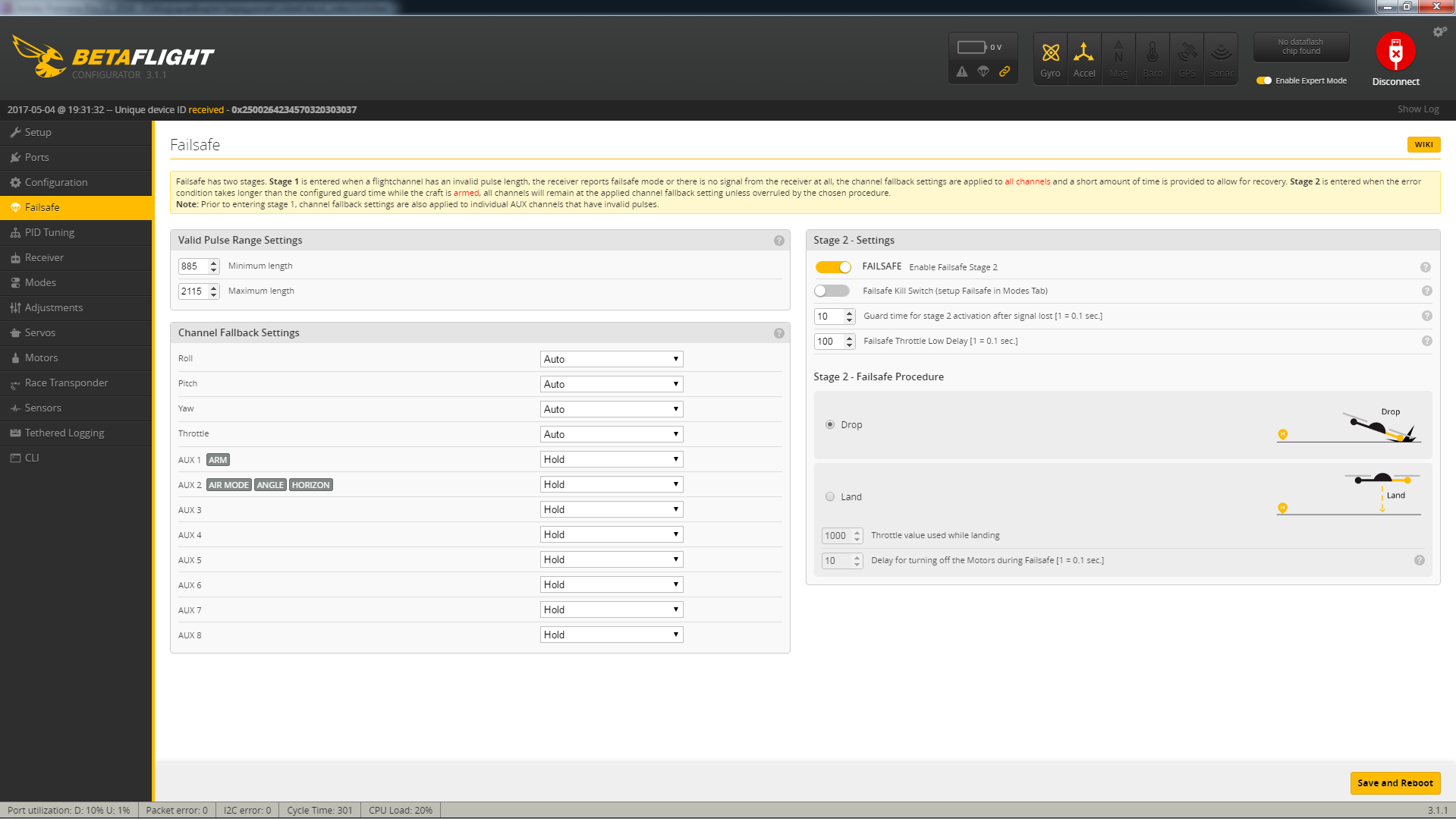
Gyorsan kalibráljuk be az accelerométert, majd mehetünk is a következő menüpontra. A következő fontos dolog - ami egyébként az összes drón versenyen kötelező, bár az a veszély nem fenyeget, hogy ezzel a géppel ilyen eseményen fogunk részt venni - a failsafe beállítása. A problémát az jelenti, hogy a 8 csatornás vevő csak AFHDS protokollt kezel, ezért a Flysky FS-i6-on nem is tudjuk a failsafet beállítani. Ilyenkor két dolgot tehetünk, a bátrak propellerrel, a nem annyira bátrak propeller nélkül lekapcsolják a távot, és megnézik mi történik.
Ha nincsen failsafe, akkor a gép az utolsó parancsot kell hogy ismételje, ha van, a jel megszakadására az előre beállított parancsot - leszállás vagy lekapcsolás - fogja végrehajtani. Ez viszont nem egy hiszem-nem hiszem dolog, mindenképpen ki kell próbálni repülés előtt, mert ha esetleg nem működik, akkor akár búcsút is inthetünk a gépünknek. Én is csináltam egy videót róla, hogy látható legyen mire gondolok, ezen megnézhetitek az eredményt.
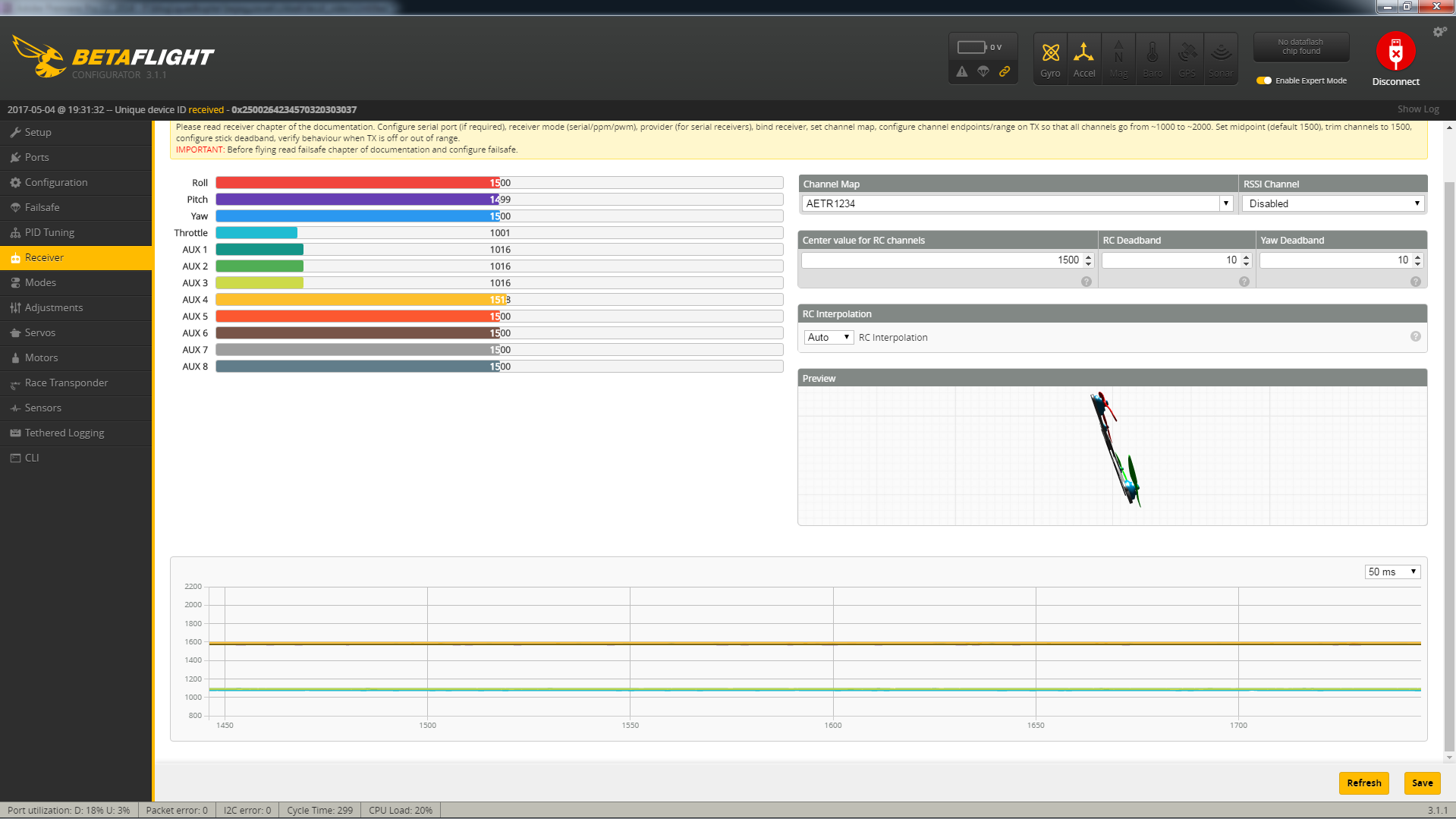
A másik fontos dolog - amit már a Furibee F36S cikkben is említettem -, hogy a kezdetektől fogva volt egy kis függőleges tengely körüli kúszás, vagyis a yaw értékhez tartozó csatornával nem volt minden rendben. Már akkor is azt gondoltam, hogy ez nem a gép hibája, hanem beállításbeli probléma, és valóban, ugyanis a távirányító bekapcsolása után a rollhoz, pitch-hez és yaw-hoz tartozó középértékek eltértek a normálistól. Általában a skála 1000-től és 2000-ig terjed, nyilván a fele 1500-ra esik, itt kellene állnia az összes csatornának a megfelelő beállítások esetén.
Ez azonban 1518-at mutatott a Betaflight bekapcsolása után, vagyis a távirányító subtrim gombjaival ezt 1500-ra kell állítanunk. Az endpoint menüben pedig a kar végállását kell 1000-re és 2000-re állítanunk, így nem fog kúszni többet a gépünk, és megoldódik a fent említett probléma.
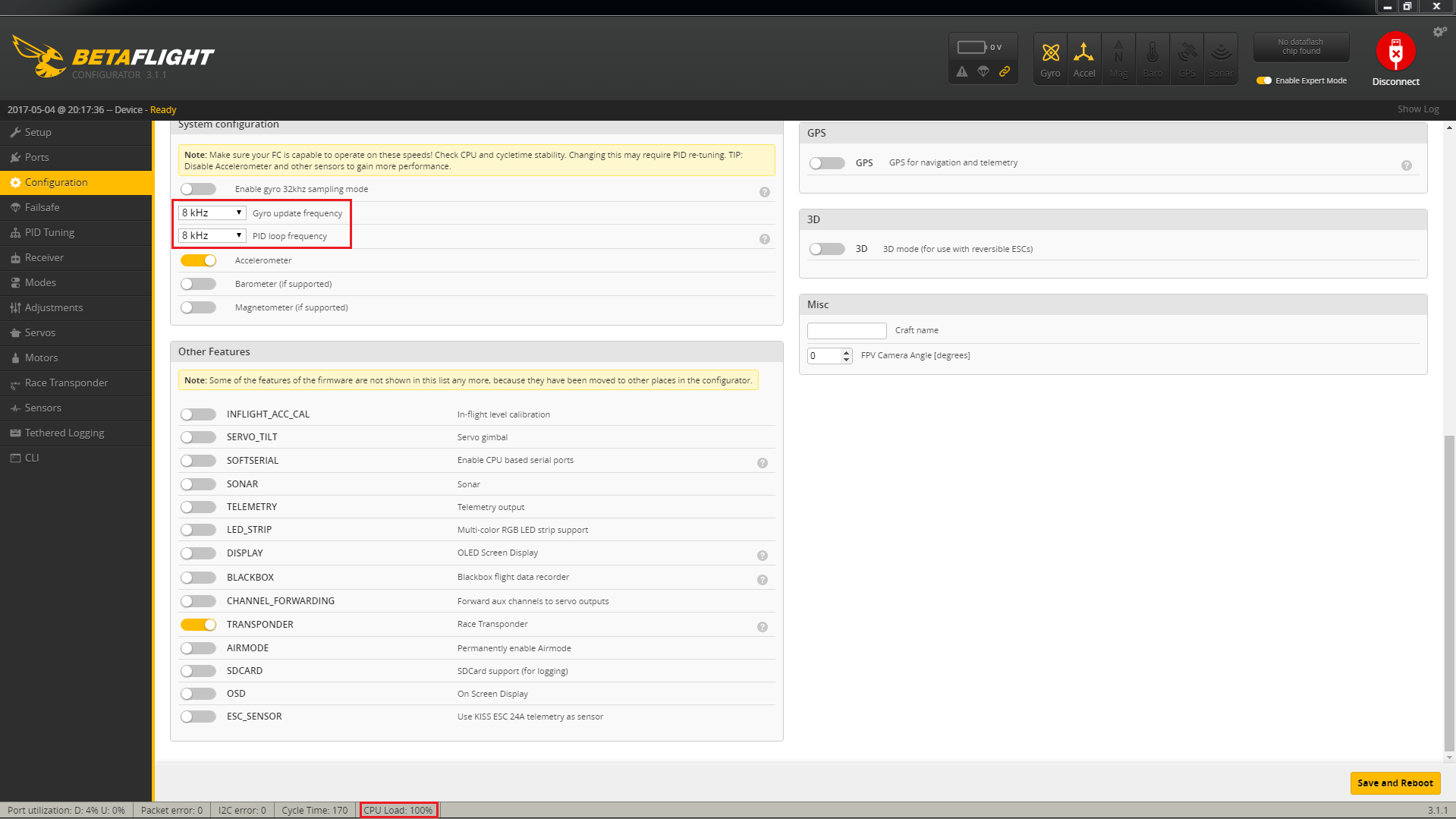
Van még egy beállítás, amelyik érdemben befolyásolja a gép repülési tulajdonságait, ez pedig a vezérlőhurok frissítési frekvenciája, amit Kilohertzben adnak meg. A nagyon gyors frissítés azonban kihajtja a repülésvezérlő processzorát, amit százalékosan láthatunk alul a státuszcsíkon. Ez 4Khz esetében 20-23% , 8Khz-nél azonban már 100%-on hajtjuk az F3 vezérlőt, vagyis ez már túl sok a hardvernek, maradjuk az előző értéknél.
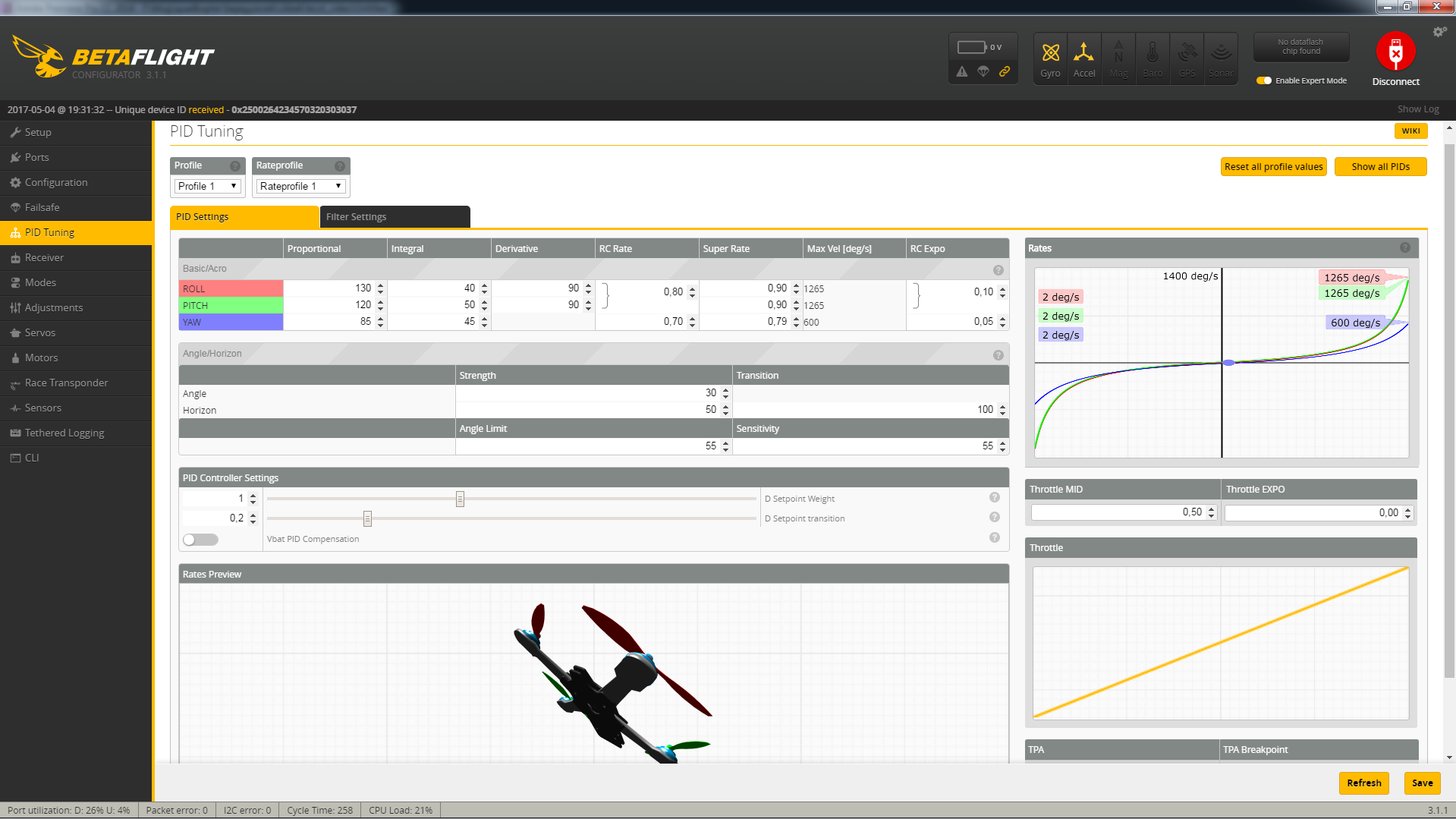
A következő lépés a PID beállítás, ezt érdemes egy youtube videóból "kilesni", hiszen valaki már úgyis beállította, és általában a bakcup fájlokat mindenki meg szokta osztani, én is így teszek, innen letölthető. Visszakanyarodva a beállításokhoz, a "max vel", vagyis maximális gyorsulási értéket fokban adják meg, ezt én megemeltem, illetve a "rate" görbével lehet még egy kicsit játszani. Nem mennék bele a dolog pontos működésébe, mert ahhoz nem elég mély a jelenlegi tudásom, de a lényeg az, hogy így sokkal finomabban repül a gép.
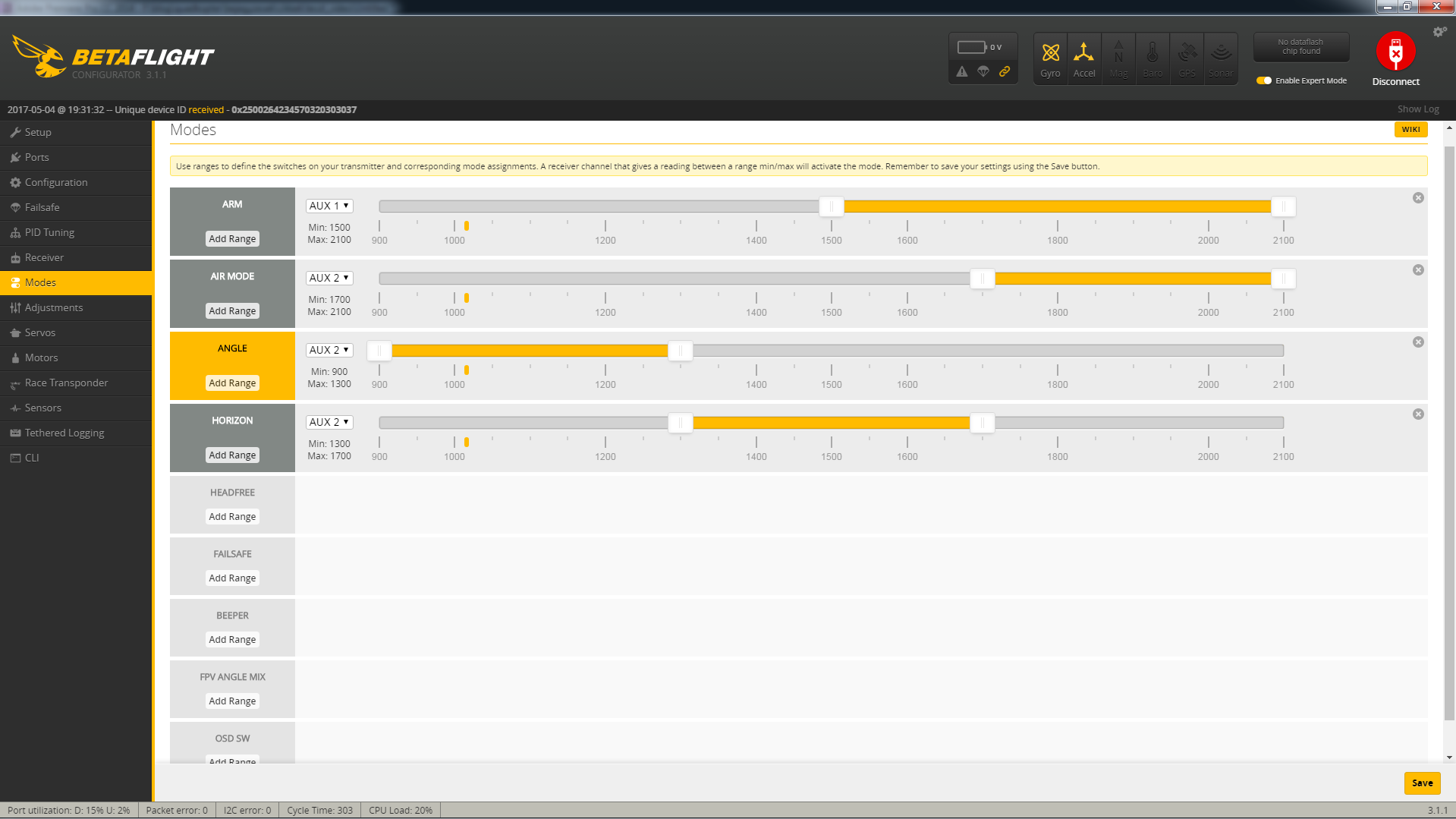
Az i-re a pontot, a repülési módok beállításával tehetjük fel. Itt viszonylag egyszerű dolgunk van, mert 8 csatorna is rendelkezésünkre áll, a gép meg alig tud valamit, konfiguráljuk az alábbiak szerint:
- AUX 1: arm/disarm, a csúszkán 50/50%-os osztással
- AUX2: angle/horizon/acro egyharmados osztással
- AUX2: Air mode on/off 2/3-1/3 osztással úgy, hogy az acro módot fedje hosszra, így egy kapcsolóval válthatunk két funkciót is
Gyakorlatilag marad két üres csatornánk, amit sajnos nem tudunk mire beállítani, de ez a helyzet a legritkább esetben szokott így lenni, sokkal inkább az a jellemző, hogy hiány alakul ki. Nincs más hátra, mint hátradőlni a székben, felvenni az FPV szemüveget és önfeledten repülni.




