Építsünk együtt I. /videóblog 9. adás/ - a váz és a PDB
 Volt itthon egy tonnányi alkatrészem és úgy gondoltam, jó lenne belőle összedobni valamit, ezért az egyik este, amikor szakadt az eső és fújt a szél, elkezdtem feldobálni őket egy vázra, unalmamban. Aztán beugrott, hogy mi lenne ha közben el is magyaráznám, hogy mit és miért csináltam, akkor még hasznossági faktora is lenne. Aztán eszembe jutott, hogy mi lenne, ha hibákat is elrejtenék a gépben (a kommetmezőben jöhetnek az ötletek), amit később ki lehet javítani, illetve a gépet is lehetne fejleszteni, szépen kifuttatva a témakört egy működő kopterre. Ez lett belőle, alant olvashatjátok.
Volt itthon egy tonnányi alkatrészem és úgy gondoltam, jó lenne belőle összedobni valamit, ezért az egyik este, amikor szakadt az eső és fújt a szél, elkezdtem feldobálni őket egy vázra, unalmamban. Aztán beugrott, hogy mi lenne ha közben el is magyaráznám, hogy mit és miért csináltam, akkor még hasznossági faktora is lenne. Aztán eszembe jutott, hogy mi lenne, ha hibákat is elrejtenék a gépben (a kommetmezőben jöhetnek az ötletek), amit később ki lehet javítani, illetve a gépet is lehetne fejleszteni, szépen kifuttatva a témakört egy működő kopterre. Ez lett belőle, alant olvashatjátok.
Mivel ez eredendően egy videóbloghoz tartozó tartalom, ezért most nem lesz maratoni hosszúságú a cikk (többen fellélegeztek, mint Darth Vader a sisak levétele után), de nem ússzátok meg a fejtágítást, mert így most a videó lesz hosszú:D
Az ötletet az adta, hogy Szacsee kolléga bevásárolt a nagy nyári Hobbyking akcióban, de egy picit sikerült túltolni az Order gomb nyomkodását, de ezt a jelenséget szerintem mindenki ismeri, aki ezzel a hobbyval foglalkozik: "annyira olcsó volt, hogy egyből kettőt kellett venni, hiszen úgy is törni fog", "ez bomba ajánlat volt, nem lehetett otthagyni", "évenként egyszer van ilyen akció, ez a 100.000 Ft igazán belefér, hiszen ha elosztom 12 hónapra..." stb., ezért jó fej volt és felajánlott számomra kettő darab Hobbyking SK450-et. Szóval most nem az ő, hanem az én ágynemű tartómban várják, hogy létezésük értelmet nyerjen. Közben én is találtam egy "nem lehetett otthagyni" csomagot az Aliexpressen, amiben jutányosan, 10.000 Ft-ért 4 db motort és 4 db ESC-t lehetett elhozni, így viszont semmilyen mentségem nem maradt, hogy miért ne építsek valamit.
Közben elkezdtem nézegetni a Hobbykingen a Deadcat szériát, aminek az alapja az SK450-e váz és rájöttem hogy ez egy remek "építsük meg, fejlesszük tovább" széria alapja lehet, miközben beszélgethetnénk egy kicsit az építésbe belevont elemekről, vagyis ma a vázakról és a PDB-kről lesz szó.
Az alapanyagok, amiből dolgoztam (ez volt itthon:D):
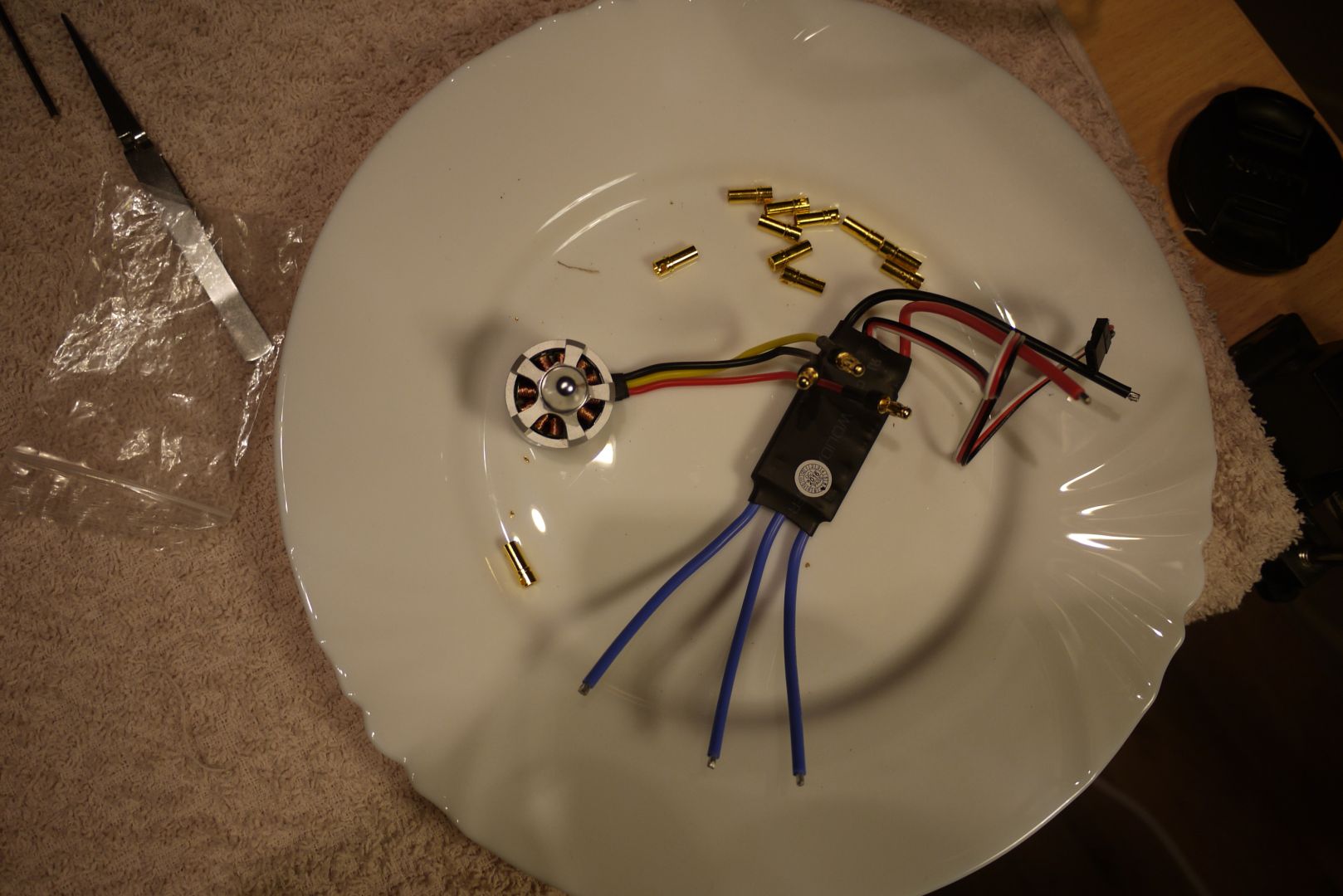
- motor : DJI másolat, 2212 920KV
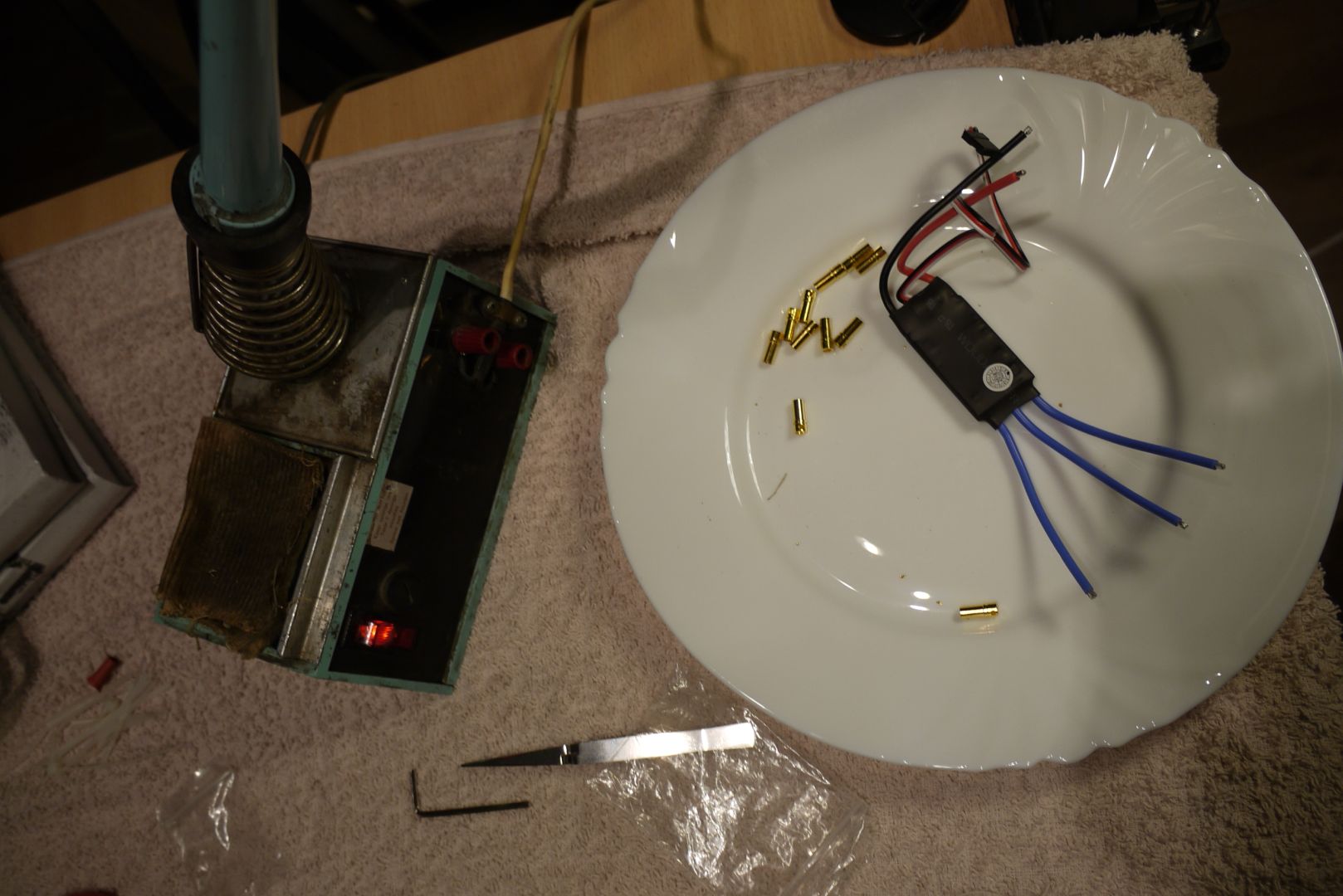
- ESC: SimonK 30A
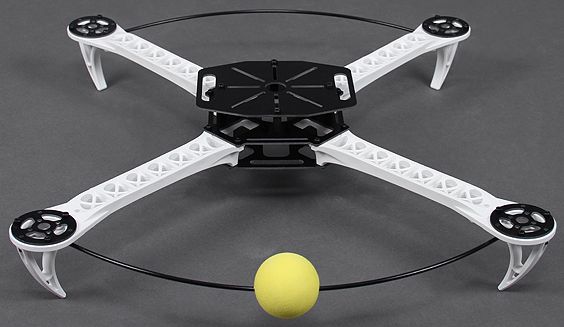
- váz: Hobbyking SK450
- PDB: Lantian mini PDB
- vevő: Flysky FS-iA6 6 csatornás
- propeller: Gemfan 1038 carbon nylon
- vezérlő: Tarot Naze 32 6DOF STM32F1
Csak a főbb választási szempontokat írom le, mert a videóban minden benne van, abból kell okulni. A videót a cikk végén találjátok, tehát aki nem akarja elolvasni a választási szempontokat, csak meghallgatni a blablát, az ugorjon a cikk végére. / ha valami kimaradt, írjátok meg és beleteszem, jelölve a beküldő nevét/




VÁZAK
1. Milyen anyagból legyen
- műanyag: olcsó, de törik, közepes súlyú, kis pénzből pótolhatóak az alkatrészek, a rácsszerkezetűek azért erősebbek, pl. Hobbyking SK450
- üvegszál: erős, nehéz és rideg, viszonylag ellenálló, közepes árú váz
- karbon: erős, rugalmas, de drága, vezeti az áramot, tehát mindent szigetelni kell, pótalkatrészek nem mindig vannak (márkásnál azért akad), pl. Impulse RC verseny vázai
- kevert: műanyag külső, belül karbonlappal erősítve, közepesen drága, ellenálló, viszonylag könnyű váz, pl. DJI Flamewheel sorozat
2. Mekkora méretű legyen
- hány mm legyen: a vázak méretét motortengelytől motor tengelyig mért távolságban szokták meghatározni, pl. 450 mm-es váz esetében az átellenes motorok tengelyközepének a távolsága 450 mm.
- propellerméret: a vázmérettől függ, hogy mekkora propellert forgató motorok kerülhetnek rá (értsd: ami még elfér). A propeller méretet jellemzően inchben határozzák meg
- 200 nál kisebb: 4 inches propeller
- <200-250: 5 inches propeller
- <250-290: 6 inches propeller
- <300-320: 7-8 inches propeller
- <330-350: 8-9 inches propeller
- <360-390: 10 inches propeller
- <400-450: 11 inches propeller
- <460-500: 12 inches propeller
- <500: k***va nagy propeller
3. Milyen motor legyen rajta
- felfogatás: furattávolságot meg kell néznünk, de a legtöbb motorhoz vannak átalakító szettek.
- önsúly: mekkora össztömeget akarunk majd megemelni, ennek egy jelentős része a váz szokott lenni
4. Milyen magas legyen
- láb: magas láb kell akkor, hogy ha akarunk gimbalt és kamerát elhelyezni a gép alatt. Minél magasabb a láb, annál instabilabb a váz
- hol legyen a láb: több elrendezés is van, van ahol a kar végén van a láb, van ahol a test és a kar találkozásához kerül, illetve lehetnek a karok asszimetrikus elrendezésűek (EKEN drón), ahol vegyes
- lehet a váz lapos, ha az akkumulátor felülre vagy a testbe kerül, illetve a gimbal és a kamera elforgatva a fronton helyezkedik el, pl. Immersion Xugong V2
5. Áram elosztó lap
- beépített: a váz szerkezeti elemét képezheti egy PDB is, amin vannak forrasz pontok. Ez akkor hasznos, ha 3S akkumulátort fogunk használni, mert akkor a 12V-os áramköri elemeket ide lehet forrasztani, pl: 12V led, FPV adó, gimbal stb. Magasabb feszültségnél nem beépítettet szoktak használni. Másik hátránya, hogy a váz feszíti a PDB-t, csavarodhat
- nem beépített: külön meg kell vennünk, de a márkásabb vázakhoz szoktak adni jó minőségű PDB-ket, ami nem a váz szerkezeti része, hanem egy különálló elem. A PDB-t érdemes az akkumulátor közelében elhelyezni, az egyszerűbb bekötés miatt
6. Milyen formájú legyen
- szimmetrikus vagy asszimetrikus: a karok egyforma szögben állnak és egyforma hosszúak vagy sem. Kamera platformok esetében az első karokat nagyobb szögben szokták feltenni, hogy ne legyenek benne a kameraképben. Ezek majdnem mindig X4 elrendezésűek
- motorszám: a vázak sokfélék lehetnek, alapvetően a céljaink határozzák meg azt, hogy milyen legyen az elrendezés:
- Y3: 3 motor, szervomotorral kiegészítve, tricopter
- X4: 4 motor, szimmetrikus vagy asszimetrikus váz
- H4: mint az X4, csak más az alakaja
- V-tail: 4 motor, V alakú farokelrendezéssel, 45 fokban vagy jobban felfele fordítva
- Penta: 5 motor, egy Y ágon elrendezve (extrém ritka)
- Y6: 6 motor, karonként párban, szervomotor nélkül
- Hexa: 6 motor hagyományos elrendezésben, egymáshoz képest 60 fokban
- Okto: 8 motor, hagyományos elrendezésben, egymáshoz képest 45 fokban (DJI S1000)
- X8: 8 motor, X4 elrendezésben, de alul és felül is vannak motorok (pl. heavy lifterek ilyenek, Hammer drón)
A fentiek alapján a videóban használt váz egy: Hobbyking SK450, 450 mm-es, X4 elrendezésű, szimmetrikus, műanyagból készült váz, amely nem tartalmaz PDB-t, maximálisan 11 inch méretű propeller fér el rajta, háromféle, különböző magasságú talppal rendelkezik és a 22xx motorokokat képes alapból fogadni .
PDB
- méret és súly: kicsivel nehéz dolgozni, nagy meg nem fér el, cserébe minél nagyobb, annál nehezebb
- áramtűrés: ez az ESC-ről, a PDB-re átfolyó áram mértéke, 80A-től 120A-ig viszonylag sokféléből válogathatunk, fölötte azért már ritkább. Az áramtűrés értékét amper/motor értékként is meg szokták adni, pl. 20/A motor egy 4 motoros PDB esetén 80A
- integráltság: bizonyos esetekben, egy lapkára integrálják az összes áramköri elemet, pl. a vezérlőt is (pl. Emax Nighthawk Pro 280)
- felfogatási pont: van vagy nincs, spacerrel (műanyag határoló) megemelhető-e, kockába rendezhető-e (pl. TBS Powercube)
- tartalmaz-e más áramköri elemeket, ami lehet:
- BEC: battery eleminator circuit, 5V, 12V vagy mind a kettő, ez egy áramregulátor és magasabb feszültségből kisebbet csinál, a többi áramköri elem számára
- BEC áramtűrése: mekkora áramot tud lekezelni, ez a feszültségtől szokott függeni. Jellemző értékek: 5V=3A, 12V=500 mAh, a magasabb áramtűrésűek általában drágábbak
- Buzzer: sípol, ha leesik a feszültség (Low voltage), illetve csipogtatható a távról, keresés céljából
- OSD: tartalmazhat olyan modult, amelynek segítéségével a képernyőre adatok írathatóak vissza, pl. feszültség
A fentiek alapján a videóban használt PDB egy: Lantian mini PDB, amelyen nincsenek felfogatási pontok, 45x25 mm, 3-6S akkumulátorokkal tud üzemelni, 500mAh 4S-en és 200mAh 6-S-en a terhelhetősége, tartalmaz egy 5 és egy 12V-os BEC-et, de mást nem.
A sorozat eddig megjelent részei:
- quadkopter.blog.hu videóblogjának 9. adása /1. építős rész/ - a váz és a PDB
- quadkopter.blog.hu videóblogjának 10. adása /2. építős rész/ - a motor és az ESC
- quadkopter.blog.hu videóblogjának 11. adása /3. építős rész/ - a vezérlő
- quadkopter.blog.hu videóblogjának 12. adása /4. építős rész/ - a vevő
- quadkopter.blog.hu videóblogjának 13. adása /5. építős rész/ - az akkumulátor
Ezek a fő szempontok, jöjjön most a videó a fejtágítással:




