Tilt rotor - egy nem is annyira új technológia
FRISSÍTVE: 2016.04.08: javítottam egy félreérthető dolgot
A 12. heti Vásár Vasárnap kapcsán eszembe jutott egy téma, amiről - még sok más mellett - nem volt szó, ez pedig, hogy egyes járművek milyen technikával oldják meg a levegőben maradást. Ha megkérdeznénk egy gyereket, hogy miért hívjuk úgy a repülőt, ahogy, valószínűleg valami olyasmit válaszolna, hogy: "azért mert repül". Persze ez az analógia sok szempontból sántít, hiszen tudjuk hogy sem a gólya, sem a bumeráng, sem pedig az eldobott samott tégla nem tekinthető repülő járműnek. Ellenben homogenizálni sem lehet őket, hiszen vannak merevszárnyú, forgószárnyú, változó szögállású, tilt rotor rendszerű repülő alkalmatosságok is és ezek egybegyűrűzése egészen elképesztő járműveket tud összehozni, erről lesz ma szó, egy kicsit bővebben.
A cikket egyébként Alishan Mao videói ihlették, amelyben egy szervóval vezérelt tiltmotor technikával hajtott gépről van szó. Ezért elkezdtem gondolkodni azon, mennyire nem egyértelműek a fogalmak, amelyeket ezekkel a repülő alkalmatosságokkal kapcsolatban használunk. Hiszen mitől repülő a repülő, miért hívunk valamit helikopternek, multikopternek, más-e ezekhez képest a multirotoros/multimotoros gép? Mik a bevezetőben említett fogalmak? Ezeket fogjuk kicsit átbeszélni azért, hogy a végén az alábbi géphez juthassunk el: ExDrones Swift 280 Kanyarodjunk vissza egy kicsit a repülés őskorába a 19 és a 20. század fordulójára a Wright fivérekhez, amikor a mai merevszárnyú repülőgépek első modelljei, mint siklórepülők jelentek meg. Mint a nevéből is kitűnik, a klasszikus "repülő" egy merevszárnyú, repülésre alkalmas jármű, ennek lényege, hogy a szárnyfelület alatt és felett légáramlatok képződnek, amelyek felhajtóerőt biztosítanak a merevszárnyú repülőgép számára. Ezen repülőgépek mozgását egy valamilyen motor vagy motorok hivatottak segíteni. Minél gyorsabban halad előre a repülő, annál nagyobb erők ébrednek a szárnyfelület körül. Ahhoz, hogy a repülő a megfelelő irányba tudjon elmozdulni az egyenes vonalú mozgásából, úgynevezett vezérsíkokra (csűrőlapokra) van szükség. Ezeket a csűrőlap neveket a multirotoros világban is használjuk, aileron, rudder, elevator, attól függően melyik lapátról van szó. Mivel a motor nem mozgatható, ezért ezek a csűrlőlapok növelik vagy csökkentik a magasságot vagy éppen fordítják a gépet a megfelelő irányba.
Kanyarodjunk vissza egy kicsit a repülés őskorába a 19 és a 20. század fordulójára a Wright fivérekhez, amikor a mai merevszárnyú repülőgépek első modelljei, mint siklórepülők jelentek meg. Mint a nevéből is kitűnik, a klasszikus "repülő" egy merevszárnyú, repülésre alkalmas jármű, ennek lényege, hogy a szárnyfelület alatt és felett légáramlatok képződnek, amelyek felhajtóerőt biztosítanak a merevszárnyú repülőgép számára. Ezen repülőgépek mozgását egy valamilyen motor vagy motorok hivatottak segíteni. Minél gyorsabban halad előre a repülő, annál nagyobb erők ébrednek a szárnyfelület körül. Ahhoz, hogy a repülő a megfelelő irányba tudjon elmozdulni az egyenes vonalú mozgásából, úgynevezett vezérsíkokra (csűrőlapokra) van szükség. Ezeket a csűrőlap neveket a multirotoros világban is használjuk, aileron, rudder, elevator, attól függően melyik lapátról van szó. Mivel a motor nem mozgatható, ezért ezek a csűrlőlapok növelik vagy csökkentik a magasságot vagy éppen fordítják a gépet a megfelelő irányba.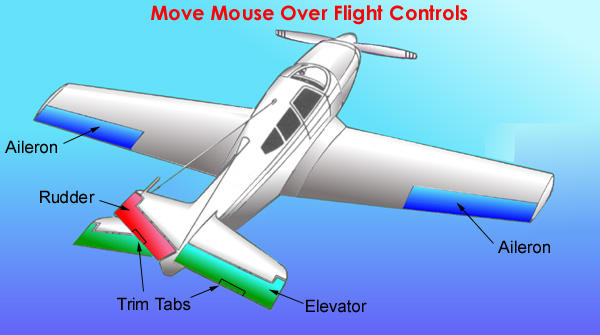
Néhány dolog következik a merevszárnyú elrendezésből, amelyek az alábbiak:
- a gépeknek folyamatosan mozogniuk kell, hogy a felhajtóerőt fenntartsák, vagyis ezek a gépek nem képesek lebegni
- a merevszárnyyú repülőgépek szárnyai, meglepő módon merevek
- a gépek motorja fix, mindig a törzzsel párhuzamosan fejtik ki a hatásukat, vagyis az erővektor a gép törzsével párhuzamosan előre mutat, ezt térítik el a csűrőlapok
- a motor fordulatszámával csak a sebességet szabályozzuk, az irányt nem
- ha a fordulatszám nullára esik, a repülőgépnek még mindig van esélye leszállni, addig amíg a sebességét valamennyire fenn tudja tartani
- létezik az átesés jelensége, más néven áramláslevállás
- magas végsebességet érhet el
A fenti elrendezés mondható általánosnak a repülés világában (már amennyire élhetünk egy ilyen kényszeredett kijelentéssel). Bár a fenti kialakítás a legelterjedtebb, mégis sok más repülni képes jármű létezik, a talán második legismertebb a helikopter. A helikopter szó a görög "helix" vagyis csavar szóból származik, de szokták változó szögállású, forgószárnyas repülő járműnek is hívni. Itt már látható, hogy az egyik megkülönböztető jegy a szárnykialakításból származik, vagyis lehet valami merev vagy forgószárnnyal rendelkező repülő jármű. A helikopter a sebességét abból nyeri, hogy a fő rotor (ezt mindjárt kifejtem) fordulatszámát maximumra emeli, amely egy függőleges erővektort képez a gép testére. Ahhoz, hogy a helikopter felhajtóerőt termeljen, változtatnia kell a lapátok szögállását, különben nem tudna a levegőbe emelkedni, csak a levegőt kaszabolnia (javítva, köszönöm Patics kollégának). Ezzel viszont csak azt érnénk el, hogy a gép emelkedne és süllyedne, miközben a tengelye körül forgómozgást végezne. Ennek kiküszöbölésére létrehoztak egy farokrotort, amely a középre irányuló forgatónyomatékot hivatott kompenzálni. A másik fontos tulajdonsága a helikopternek, hogy az irányváltásait a rotortengely forgásának sebességével és a forgószárnyak szögállásának változtatásával éri el. A helikopter a tengelye körüli mozgást a farokrotor sebességének és lapátszögének változtatásával, míg az előre hátra és oldalra dőlést a lapátok úgynevezett ciklikus állásszög változtatásával érik el (magyarul a lapát egyik felén megváltoztatják az állásszöget). A szögállás változtatás miatt viszonylag bonyolult elektromechanikára van szükség, cserébe a szögállás gyorsan változtatható. Az ellentétes forgás kiküszöbölésére egy másik mód ha a főrotor alá egy ellentétes irányba forgó másik rotort helyezünk el, amely az eredeti forgását kompenzálja (Kamov, Chinook), ezek a koaxiális helikopterek. A fenti mechanizmus az életben is pont olyan marha bonyolult, mint ahogy leírva hangzik, ezért a helikopterek komplikált és drága repülő eszközök, cserébe viszont az alábbi előnyöket biztosítják:
- helyből felszállás, illetve a térben bármilyen irányban képes haladni (hátrafele, fejjel lefele, oldalra stb.)
- a szögállás vezérlés gyors változtatása miatt rendkívül jók a helikopter akrobatikus tulajdonságai
- a sebessége limitált, ennek az oka az, hogy a forgószárny egyes pontjai különböző sebességgel forognak és amikor a forgószárny széle eléri a hangsebességet, akkor a felhajtóerő drasztikusan lecsökken
- a helikoptereknél is van "átesés", de ez eltér a merevszárnyú repülőgépeknél tapasztaltaktól
- a helikopter motorhiba esetén sokkal nehezebben száll le, mint egy merevszárnyú repülőgép, bár az autorotációnak köszönhetően azért van rá némi esély
- relatíve alacsony végsebességet érhet el (a normális helikopterek végsebessége valahol 400km/h körül van)
Az RC hobbyban a helikopterek az egyik olyan kategória, amely a leginkább alkalmas akrobatikus mutatványok végrehajtására, ezt a lenti, Alan Szabó Jr. videó jól demonstrálja (olyan, mint ha a fizikát meghazudtoló trükkfelvételről lenne szó, de nem, ez a valóság):
Néhány fogalom elhangzott, amelyet gyorsan tisztázni is kell, az egyik a rotor. A rotor a "rotation", vagyis forgás szóból származik. Sok esetben a "motor" szóval szokták rokonértelműnek tekintetni, pedig a rotor a motor forgó, míg a stator a motor állórészéből származtatott kifejezés. Akit bővebben érdekel, az a Hobbyelektronika oldal kiváló cikkéből tájékozódhat. Maradjunk a rotor kifejezésnél.
A kérdés az, hogy ha valaki azt mondja, hogy multirotor, akkor az pontosan mit jelent? Ha feltételezzük azt, hogy létezik unirotoros repülő jármű (pl. egy merevszárnyú repülő, aminek csak egy motorja van, annak egy forgórésszel kell rendelkeznie, tehát ő lehetne unirotor), akkor minden, aminek egynél több motorja van, az multirotoros gépnek tekinthető. Ezzel csak az a probléma, hogy a helikopternek is két rotorja van, még sem hívjuk sem multirotoros, sem birotoros gépnek. A fenti furcsaság feloldására két megfogalmazást találtam az interneten:
- multirotoros gép az, amelyiknek 2-nél több rotorja van (ami persze már önmagában nem igaz, lásd Avatar film ide vonatkozó részeit)
- multirorotos gép az, amelyik az irányváltását a motorok fordulatszámával szabályozza
A második megfogalmazás igényel némi magyarázatot, és ezzel el is érkeztünk a mai cikk valódi témájához, a multikopterekhez (csúnyán megfogalmazva "drónok", ami persze megint egy másik terminológia, de a trollok kedvéért betettem, hogy legyen min csámcsogni). Ahogy már említettem, a merevszárnyú repülő a vezérsíkjainak az állásával szabályozza irányváltásait, míg a helikopter a forgószárnyak szögállásával teszi ugyan ezt. Na de mit csinál a multikopter, hogy ha sem változtatható szögállású forgószárnya nincsen, sem pedig merevszárnya? Nos, nem marad más, mint hogy a motorok fordulatszámával kell szabályozni az irányváltásokat. Ahogy a prohardver fórumtéma nyitóposztjában már Terézatya leírta, a multikopterek előrehaladásához a két front motor fordulatszámát csökkentik le, míg oldalirányú mozgás esetében az egymás mögötti motorok fordulatszámát csökkentjük. Amennyiben a tengely körül akarunk fordulni, akkor az átellenes motorok fordulatszámát kell lecsökkenteni. Ez viszont teljesítménycsökkenéssel jár. A másik kérdés, hogy a multikopterek szintén egy gyűjtőnév, a lényeg, hogy kettőnél biztosan több rotorja/motorja van, vagyis legalább 3. Ami tovább bonyolítja a helyzetet, hogy a multikopterek meglehetősen változatos vázelrendezésekkel jelentek meg, úgy hogy ne is menjünk ebbe bele, maximum egy másik cikk keretein belül. Összefoglalva a multikopterek fő tulajdonságait:
- képesek lebegni és minden irányban mozogni
- ha a motorok leállnak, leesnek
- a sok motoros gépek motorhiba esetén képesek leszállni, ha a többi motor még működik (hexa, oktokopterek)
- nem igazán akrobatikusak, a szónak abban az értelmében, ahogy egy helikopter
- nagyon egyszerű felépítésűek, egyszerű vezérlés, kevés mechanika bár a páratlan számú motorral rendelkező gépek lehetnek bonyolultabbak
- gyroszkóppal és gyorsulásmérővel rendelkeznek, ezért alapból stabilizálnak, de vannak stabilizálatlan repülési módok is, pl. Acro (más néven, manual mód)
- nincs igazi átesés a stabilizálás miatt
- egyszerűségük miatt polgári felhasználásra - játék, kamerázás - a legalkalmasabbak, mert olcsó a gyártásuk
- alap esetben nem képesek fejjel lefele repülni, de egyes modellek (3D) képesek megfordítani a propellerek forgásirányát
Találtam egy elég jó videót, hogy bemutassam, mire képes egy "normál" verseny quadkopter - egy Align MR25 - , szintén Szabó Alan Jr. kezei között:
Mostanában, mivel a multikopterek gyártása nagyon olcsó, ezért elkezdett begyűrűzni mindenféle olyan technika, ami a többi repülő járműnél volt jellemző. Az egyik ilyen, hogy ha helikoptertechnikát visszük be a multikopter világba. Itt nem kell mást tennünk, mint az X számú propellert egy fogasszíjon keresztül összekötni egy motorral és szögállásvezérlésre alkalmas mechanikát tenni a tengelyekre, már is kész a multikopterbe oltott helikopter. Ilyenkor kapunk olyan gépeket, mint a Stingray 500 (vagy ennek a másolata a WLtoys V383 500), amely egy helikopter akrobatikus tulajdonságaival rendelkezik (durván mozog mi?):
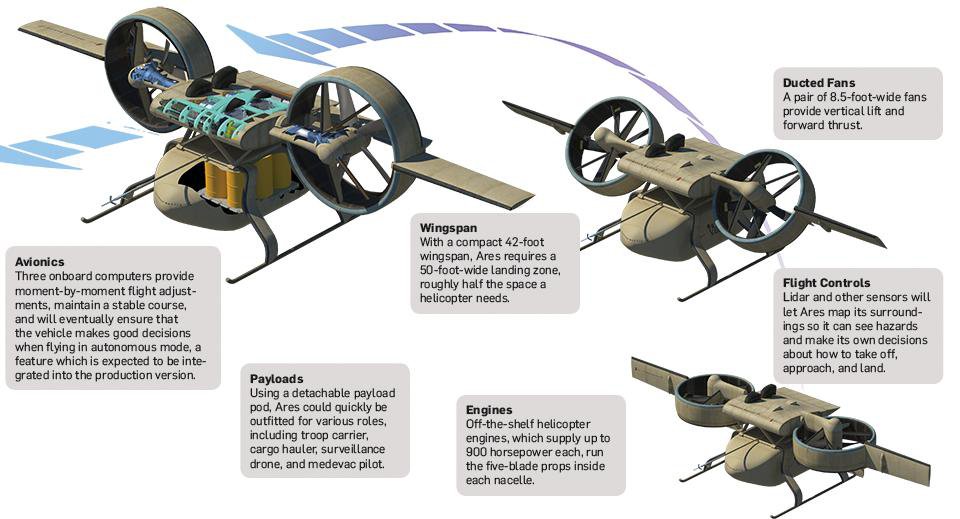
Most hogy Fábry Sándori szeszéllyel élve a teljes palettán végigmentünk, eljutottunk a Tilt motor technológiáig, ám be fogjátok látni, hogy szükség volt az előző okfejtésekre. A tiltmotor technológia lényege, hogy bár a merevszárnyas repülőgépek szárnyából alapesetben csak a vezérsíkok mozgathatóak, vannak olyan variánsok, ahol a motorok nem kizárólag előre mutatnak, hanem egy tengely mentén forgathatóak, ezeket hívjuk billenő rotoros repülőgépeknek és így néznek ki:

Ezzel az elrendezéssel sok mindent el lehet érni, pl. a helyből felszállást. Azon multirotoros gépek esetében pedig, amelyekkel mi repkedünk, a motortiltnek az erővektor irányának szabályozásában van szerepe, vagyis egy döntött motor a döntés irányába (általában előre) nagyobb hatásfokkal fog húzni. Ez egyben azt is jelenti, hogy az eddig felfele mutató erővektor egy 10 fokos motordöntésre már csak 80 fokban fog felfele és 10 fokban előre mutatni. A motor tilnek két verziója van, az egyik a fixed motor tilt, ahol általában egy műanyagperselybe helyezik a motort. Nem egy nagy valami, kb. 100 forint motoronként és mostanában elég sok ilyen típus jelent meg, pl. Eachine Falcon 250 vagy az Emax Nighthawk sorozat (az én Emax Nighthawkom is ilyen).

A dolog akkor válik izgalmassá, amikor a tilt motor rendszer kap egy szervót és a távvezérlő egy csatornájára (általában egy kétállású kapcsolóra, mint ki és bekapcsolás) kiprogramozható. Innentől kezdve bizonyos határokon belül szabadon állíthatjuk a motor dőlésszögét a karra épített szervón keresztül. Ezzel nem csak gyorsítani tudunk a gépen, hanem adott esetben fékezni is tudjuk azt és természetesen az akrobatikus tulajdonságai is nőnek a gépnek. Ami nagy plusz a gép esetében, hogy így elvileg 90 fokon túl is tudjuk dönteni a járművünket, tehát konkrétan a felszállás után a földhöz képest lefele is tud mozogni. Gyorsan összeszedtem a servo motor tilt technológia várható előnyeit:
- gyorsabb gépek
- nincs teljesítményesés előrefordításkor, sőt plusz teljesítmény nyerhető
- gyorsabb fékezés a motorok hátrafordításával
- az előre-hátra irányváltáshoz többé nincs szükség a fordulatszám leejtésére
Az alábbi videóban látható az elektromechanikai vezérlés, illetve néhány felszállás is:
A technológia egyik "apostola" Alishan Mao, akinek a neve ismerősen csenghet azok között, akik néznek multirotoros videókat. Szerintem ez a technológia a következő 1-2 évben át fogja rendezni a piacot, a kérdés csak az, hogy a plusz súly és a megbízhatóság problémáit hogyan tudják kezelni a gyártók, illetve hogy képesek-e valamilyen megoldást kitalálni az oldalirányú elmozdulásra is vagy marad kizárólag az előre hátra irány. Néhány plusz videó kedvcsinálónak:
- Swift TR260 V1 test
- Swift TR260 Tilt rotor építés Alishan Maoval
- Swift TR 260 V2 Alishan Maoval
- Swift TR260 hardcore testing Alishan Maoval
- Swift TR260 how tilting works Alishan Maoval
- Swift TR260 speed test
- Swift 280 bemutató




